This tutorial is intended to assist users with the recommended localization method for SurvCE. Other methods can be used and it is up to the individual users to determine which is best for them.
File Extensions
Localization File: *.dat
Geoid Model File: *.gsf
Coordinate File: *.crd
Raw Data File: *.rw5
Projections
It is essential that the proper plane coordinate projection is selected prior to creating a localization file. This should be the first step performed during the creation of the job file and be performed easily through File ŕ Job Settings ŕ GPS.
Geoid Model
An important item to note is if the user intends to use a geoid model (typical for localizations that contain less that 3 control points), the geoid model must be applied prior to the creation of the localization file.
A local portion of the geoid grid must be extracted from the Carlson Geoid Model using Carlson X-Port, SurvCOM, Survey or SurvCADD, and the geoid model file must be installed prior to the creation of the local geoid file. It is also highly recommended that the local geoid file grid size does not exceed 100 miles.
Web Link to the Geoid Files
http://update.carlsonsw.com/public/CarlsonGeoidGrids.exe
Transfer or Enter the Known (local) Points
It’s a good idea to simplify the process by transferring the known (local) points to the data collector prior to going to the field. Conversely, the user can keyboard enter the known coordinates for these points into the CRD file, one at a time, using File ŕ List Points ŕ Add. It is not recommended that the user keys in the local coordinates from within the localization process as transpositions can occur easily. However, this can be done as well.
Collect the GPS Locations with Averaging
Using the Surv ŕ Store Points routine, specify your point ID. It is usually a good idea to use something that will relate to the original known point. Example, if the known point for the first control point is 1, then you may want to collect the measured location as 1001.
Use the average reading icon <A> to collect several epochs of data at each point. Typically when using a 1 Hz receiver, 10 to 30 readings will be collected to ensure that the RTK solution is consistently reporting the same position for 10 to 30 seconds. On a 5 Hz receiver, the user may want to collect 50 or more readings as 50 readings would be 10 seconds.
Create the Localization File
Once the data collector has points that represent the known (local) coordinates and the measured data for these points, the localization file can be created.
Select Equip ŕ Localization ŕ Add to enter each point into the localization file.
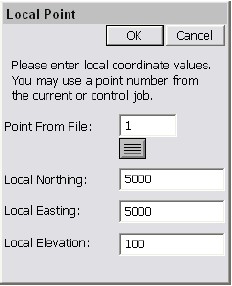
Local Point
The first dialog presented to the user will be the Local Point dialog shown below. Enter the known (local) coordinate point ID or coordinates. If the point does not exist in the CRD file and coordinates are entered into this dialog, do not enter a point ID. Select OK when the known (local) position has been defined.
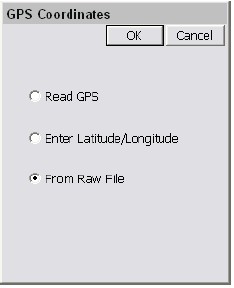
GPS Coordinates
The next dialog presented will be the GPS Coordinates dialog shown below. Since the measured locations for each point has already been recorded, the user will want to use the option From Raw File in this dialog. Select OK to continue.
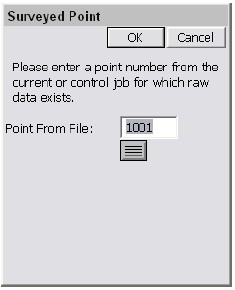
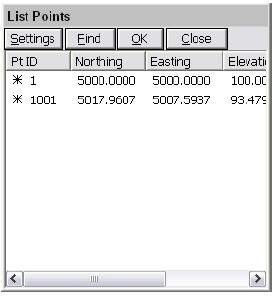
Surveyed Point
Next, the user will be presented with the Surveyed Point dialog shown below (top image). This dialog allows the user to select or enter the GPS measured point that represents the known (local) point. If the user selects the GPS measured point using the list icon, they should ignore the current coordinates displayed in the List Points dialog shown below (bottom image), as they only reflect the non-localized position at this point. The important thing to remember is that if the local point was 1, and the GPS measured point was 1001, the user must enter 1001 in this dialog.
Save the Localization File
Once all of the points have been added to the localization dialog, save the localization file before exiting using the Save button.
Reprocess Raw File and Update Coordinates
At this point all of the coordinates in the CRD file that represent the measured positions need to be updated to reflect the newly created localization. To do this, select COGO ŕ Process Raw File and process the raw file through the localization file. This will update the previously measured GPS points. Verify that the positions look valid by viewing the points in File ŕ List Points. You should be able to compare the known and measured positions to see if they look right. Depending on the localization method, the measured values may not be exactly the same as the original known positions due to error that may have existed in the original positions.
Additional GPS Measurements
Once the localization is defined, all of the GPS points measured after its creation will be recorded to the CRD file based on this localization.
Changing the Localization
If the user determines that they want to redefine the current localization during a job, they must reprocess the entire raw file after making any changes to the localization file. It may be prudent to simply define a new localization file from scratch, leaving the original intact, and reprocess the raw file through this new localization file. Just remember that the last localization loaded, will be the current localization.
Selecting Projections for use in Localization
Whenever you select a projection or coordinate system, you can place it in a “most used” list of coordinate systems to choose from under the GPS tab in Job Settings. This list can contain one projection system or many different systems the user selects.
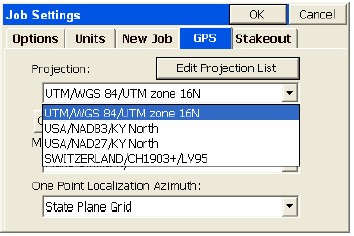
This is a special list of either predefined (eg. KY North NAD83) or user-defined coordinates systems. To get the list started or add to the list, select Edit Projection List and click Add Predefined. In the U.S., for example, surveyors might want to keep the UTM (WGS84) system plus the NAD83 and NAD27 “state plane” zones in the list for quick access, covering the region of your work. European and other worldwide zones can be added. When setting up a UTM selection, you can choose your zone, referencing the graphic below for the US:
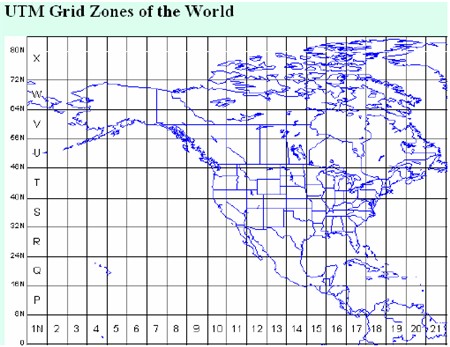
You can see a map of the UTM zones online at:
http://www.dmap.co.uk/utmworld.htm
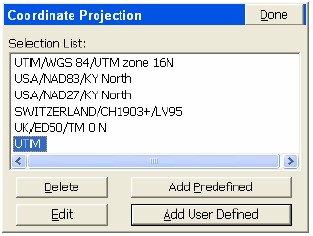
To edit the list of saved projections, click on Edit Projection List. Here we select a user-defined UTM system from the list to Delete or Edit.
Choosing Edit will bring you to the screen below:
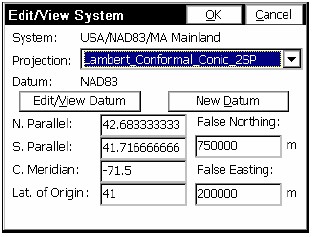
From this screen, you can select the Projection calculation method as well as calculation parameters. Projections include:
Lambert Conformal_Conic_2SP,
Transverse_Mercator,
Oblique_Sterographic (Double),
Lambert_Conformal_Conic_1SP,
Oblique_Mercator_83,
Stereographic, Oblique_Mercator_27,
Transverse_Mercator_OSTN02,
Oblique_Stereographic_RD2000,
Oblique_Mercator,
Cassini_Soldner,
Transverse_Mercator_27,
Lambert_Conformal_Conic_27,
Transverse_Mercator_Alaska_27
Transverse_Mercator_34.
You may also use the buttons on this screen to edit the existing datum or create a new datum definition.
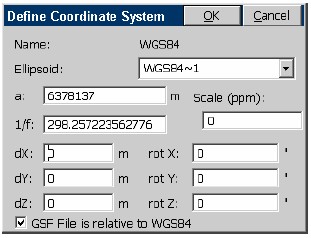
The Datum definition screen is where you select the ellipsoid and Helmert parameters to apply.
If you select Add User Defined within the Coordinate Projection List screen, you proceed to the screen below:
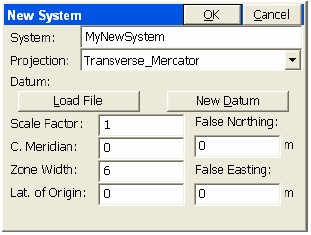
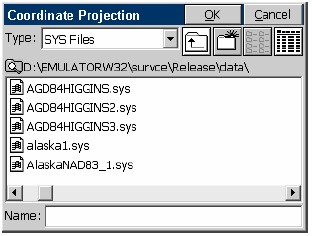
Here you enter the name of the new system and select the projection type and parameters, or you can “Load File” to load a pre-defined system stored earlier (in the form *.sys or *.csl).
If you select “Add Predefined” to create a new, stored projection system, you will be presented with this screen:
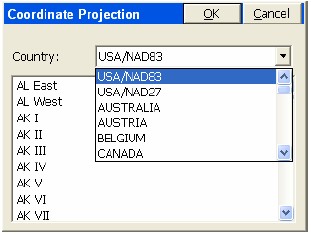
Here you can select the country and then the corresponding system for your area. There is a very extensive list of European and Asian systems including in the list.
The “quick-access” short list of most used projections enhances job efficiency.