Using the
Register command will look at position differences between
the Control
Points (presumed to be correct in World Space) and either
the Coordinate
Points, or a list of Target
Points from a Scan Position (either of which can be written
to via picking points in Create Point
mode).
To register a cloud, click on the Cloud in the Current
Project tree and select Register.
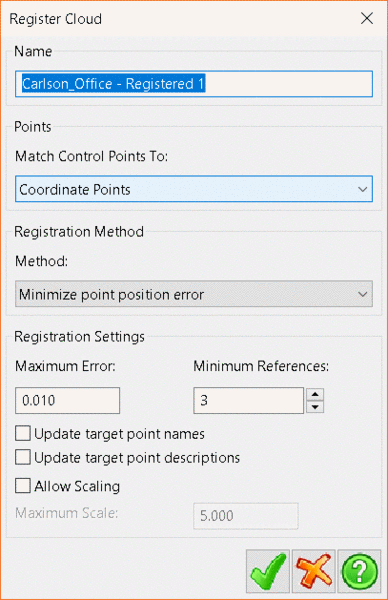
Enter a name for the new, registered Cloud.
From the Match Control Points To
drop-down menu, select whether to use Coordinate
Points or Targets Points from a Scan
Position.
There are four registration methods available;
Use existing references, Match point names, Match
point descriptions and Minimize point position error. If
selecting Minimize point position error, the Registration Settings
panel will activate and users can set Maximum Error,
Minimum References and toggle Update target point
names, Update target point descriptions and
whether to Allow Scaling.
When satisfied, click the Green Tick to begin the
registration.
PointCloud will then transform the whole Cloud
to align the points selected, creating a new point cloud. The new
cloud will be displayed under the Clouds sub-menu in the
Current Project tree.