To clean a Cloud, right-mouse click the desired Cloud in the
Current Project tree and select Clean. This
will open the Clean Cloud window.
If viewing a Cloud in a scene, select the part of the cloud to
clean using the options in the Selection Set panel
of the Action Tab, then select
Clean from the Edit
panel.
To clean multiple Clouds, right-mouse click on Clouds in
the Current Project tree, then select Clean.
The Select Clouds to Clean window will be displayed. Select
the desired clouds and then click on the Green Tick or click
Select All to select all of the Clouds in the current
project.
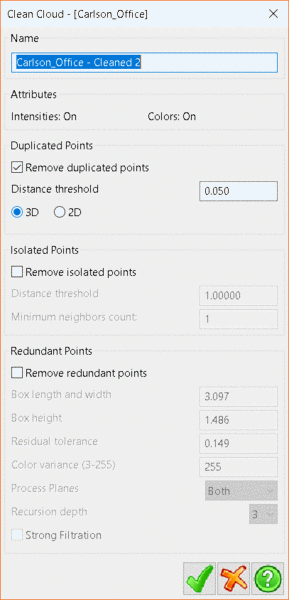
The Clean function will attempt to clean up the data in a cloud through three different methods: Duplicate Points and Isolate Points may be used individually or in combination. To use Redundant Points the first two options must be disabled.
Remove Duplicated Points method will search for any places where two or more points in the cloud are within the Distance threshold of each other. If any such points are found, they are deleted from the cloud. This method is to help remove redundant data that, for all intents and purposes, are the same given the current data set (say a data set that spans several miles having two points within inches of each other) and reduce the size of the data set. This can be carried out on a 2D or 3D basis. The 3D method runs faster. Usually clouds that are produced by stationary scanners have more points than necessary right next to the scanner, and need this kind of cleaning.
Remove Isolated Points method will search for any points in the cloud that have less than Minimum Neighbors Count points within Distance Threshold units from them and delete them. This will remove points that are likely to be outliers, which could be a result of bad data (such as the scanner hitting a dust particle several meters off the ground). After clicking the green check button, the cloud cleaning process will begin. The time required to clean a dataset varies depending on the size of the dataset.
Redundant Points method uses a series of user parameters to clean points from the cloud. This is most useful before creating a Mesh(TIN), because it will reduce flat parts down to one point. Using a box of user defined size, points are checked for fitting the plane and/or color match. If no points match the box is subdivided and the check repeated. These sub-boxes will again be subdivided if no points match. If points are found that meet the criteria a point closest to the average of those in the box is copied to the clean cloud. If no match is found, all the points from that box are copied into the clean cloud unless Strong Filtration is on.
- Box Length and Width Sets the horizontal distance to search for points to compare.
- Box height Sets the vertical component completing a 3D cube search area for points to compare.
- Residual tolerance is the measure of how far from a best fit plane points can be. A typical value would be 1/10 of the smallest box dimension.
- Color variance determines how much the color of a point can vary. When set to 255 color variance is not used.
- Process Planes allows the user the ability to choose to clean vertical or horizontal data only or to clean both.
- Recursion depth is the number of times we initial box is subdivided to find points that meet the parameters. Typical values used would be 3 or 4.
- Strong Filtration when on copies a point closest to the average for plane and/or color even if no plane or color match was established.
Click the Green Tick to begin the cleaning process. The
new, cleaned Cloud will be displayed under the Clouds
sub-menu in the Current Project tree.