SurvNet
SurvNet is Carlson's network least squares adjustment program. This program performs a least squares adjustment and statistical analysis on a network of raw survey field data, including both total station measurements and GPS vectors. SurvNet simultaneously adjusts a network of interconnected traverses with any amount of redundancy. The raw data can contain any combination of traverse (angle and distance), triangulation (angle only) and trilateration (distance only) measurements, as well as GPS vectors. The raw data does not need to be in any specified order, and individual traverses do not have to be defined using any special codes. All measurements are used in the adjustment.
Entry Point:
Entry into the SurvNet program is easy. It can
be accessed in two different ways. The easiest way to start the
program is to select
SurvNetfrom the Survey menu. The other method is to start
SurvNet from within the Raw Data File editor. You get to this
editor by selecting
Edit-Process Raw Data Filefrom the Survey menu. When in the
editor, selecting the Process (Compute Pts) menu and click
SurvNet.
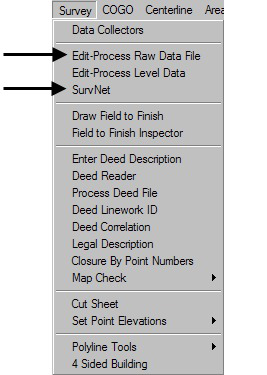
Survey menu shows the
two ways to access SurvNet
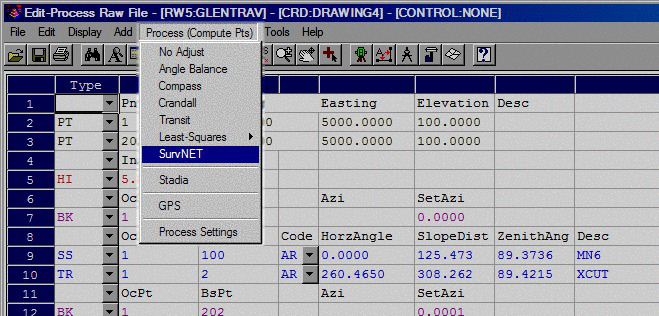
Process menu inside
of Raw Data File Editor
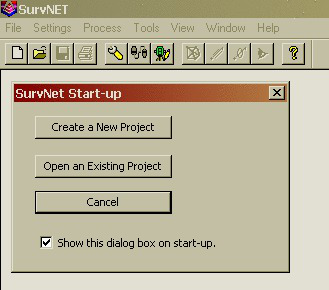
The Opening SurvNet Window
Following is the SurvNet start-up dialog box.
This dialog box is displayed when SurvNet is first started. SurvNet
is a project based program. Before performing a least squares
adjustment an existing project must be opened or a new project
needs to be created. This opening dialog box allows the user to
open or create a project on start-up. You also can create or open a
project from the 'Files' menu. Since all project management
functions can be performed from the 'Files' menu this start-up
dialog box is a convenience. So, the 'Show this dialog box on
start-up' can be unchecked and the start-up dialog box will not be
displayed when SurvNet is started.
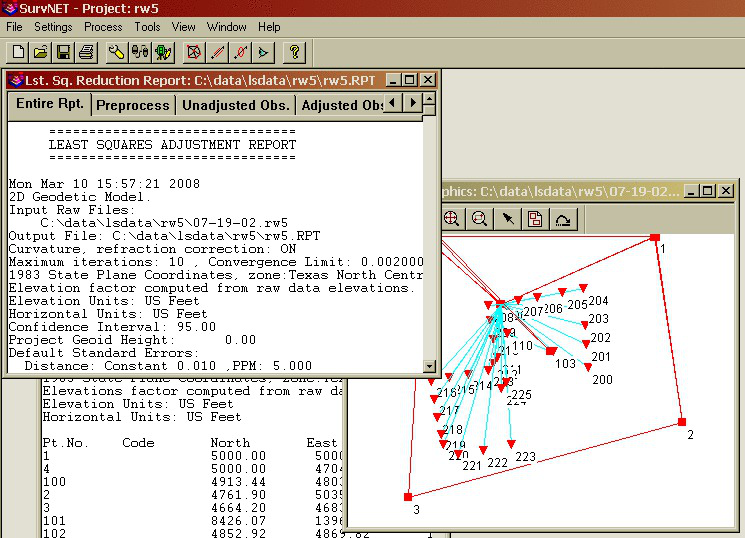
Following is a view of the SurvNet main
window with an existing project opened.
Key Features of SurvNet
- SurvNet reduces survey field
measurements to grid coordinates in Assumed, UTM, SPC83 SPC27, and
a variety of other coordinate systems. In the 2D/1D model, a grid
factor is computed for each individual line during the reduction.
The elevation factor is computed for each individual line if there
is sufficient elevation data. If the raw data has only 2D data, the
user has the option of defining a project elevation to be used to
compute the elevation factor.
- SurvNet supports a variety
of map projections and coordinate systems including the
New Brunswick Survey Control coordinate system, UTM, and user
defined systems consisting of either a predefined ellipsoid or a
user defined ellipsoid and one of the following projections,
Transverse Mercator, 1 Standard Parallel Lambert Conformal, 2
Standard Parallel Lambert Conformal, Oblique Mercator, and the
Double Stereographic projection.
- A full statistical report containing
the results of the least squares adjustment is produced and written
to the report (.RPT) file. An error report (.ERR) file is created
and contains any error messages that are generated during the
adjustment.
- Coordinates can be stored in a
Carlson (.CRD) file, C&G (.CRD) file, Simplicity file or an LDD
file. An ASCII coordinate (.NEZ) file is always created that can be
imported into most any mapping/surveying/GIS program. The user has
the option to compute unadjusted preliminary coordinates.
- There is an option to compute
traverse closures during the preprocessing of the raw data.
Closures can be computed for both GPS and total station traverses.
Closure for multiple traverse loops in the same raw file can
be computed.
- SurvNet can combine GPS vectors and
total station data in a single adjustment. GPS Vector files from
Leica, Thales/Ashtech, Topcon and Trimble can be input, as can GPS
files in the Carlson format.
- SurvNet includes a variety
of blunder detection routines. One blunder detection method is
effective in detecting if the same point number has been used for
two different points. Additionally this blunder detection
method is effective in detecting if two different point
numbers have been used for the same physical position. This
method also flags other raw data problems. Another blunder
detection method included in SurvNet is effective in isolating
a single blunder, distance or angle in a network. This method does
not require that there be a lot of redundancy, but is effective if
there is only one blunder in the data set. Additionally, SurvNet
includes a blunder detection method that can isolate multiple
blunders, distances or angles in a network. This method does
require that there be a lot of redundancy in the network to
effectively isolate the multiple blunders.
- Other key features include:
Differential and Trig level networks and loops can be adjusted
using the network least squares program. Geoid modeling is used in
SurvNet, allowing the users to choose between many different Geoid
models. The user can alternately enter the project geoid
separation. There are description codes to identify duplicate
points with different point numbers. The user can specify the
confidence interval from 50 to 99 percent.
Network Least Squares Reduction
SurvNet performs a least
squares adjustment and statistical analysis of a network of raw
survey field data, including total station measurements,
differential level data and GPS vectors.
SurvNet simultaneously adjusts a network of interconnected
traverses with any amount of redundancy. The raw data can contain
any combination of angle and distance measurements, and GPS
vectors. SurvNet can adjust any combination of trilaterations,
traverses, triangluations, networks and resections. The raw
data does not need to be in a linear format, and individual
traverses do not have to be defined using any special codes.
All measurements are used in the adjustment.
General Rules for Collecting Data for Use in Least Squares
Adjustments
Least squares is very flexible in terms of how
the survey data needs to be collected. Generally speaking, any
combination of angles, and distances combined with a minimal
amount of control points and/or azimuths are needed. This data can
be collected in any order. There needs to be at least some
redundancy in the measurements. Redundant measurements are
measurements that are in excess of the minimum number of
measurements required to determine the unknown coordinates.
Redundancy can be created by including multiple GPS and other
control points within a network or traverse. Measuring angles and
distances to points in the network that have been located from
another point in the survey creates redundancy. Running additional
cut-off traverses or additional traverses to existing control
points creates redundancy. Following are some general rules and
tips in collecting data for least squares reduction.
- Backsights should be to point
numbers. Some data collectors allow the user to backsight an
azimuth not associated with a point number. SurvNet requires that
all backsights be associated with a point number.
- There has to be at least a minimum
amount of control. There has to be at least one control point.
Additionally there needs to be either one additional control point
or a reference azimuth. Control points can be entered in either the
raw data file or there can be a supplemental control point file
containing the control point. Reference azimuths are entered in the
raw data file. The control points and reference azimuths do not
need to be for the first points in the raw data file. The control
points and azimuths can be associated with any point in the network
or traverse. The control points do not need to be adjacent to each
other. It is permissible, though unusual, to have one control
point on one side of the project and a reference azimuth on the
other side of the project.
- Some data collectors do not allow
the surveyor to shoot the same point twice using the same point
number. SurvNet requires that all measurements to the same
point use a single point number. The raw data may need to be edited
after it has been downloaded to the office computer to insure that
points are numbered correctly. An alternative to renumbering the
points in the raw data file is to use the 'Pt Number substitution
string' feature in the project 'Settings' screen. See the
'Redundant Measurement' section for more details on this
feature.
- The majority of all problems in
processing raw data are related to point numbering issues. Using
the same point number twice for different points, not using the
same point number when measuring the same point, misnumbering
backsights or foresights, and misnumbering control points are all
common problems.
- It is always best to explicitly
define the control for the project. A good method is to put all the
control for a project into a separate raw file. A big source of
problems with new users is a misunderstanding in defining their
control for a project.
- Some data collectors may have
preliminary unadjusted coordinates included with the raw data.
These coordinate records should be removed from the raw file. The
only coordinate values that should be in the raw file are the
control points. Since there is no concept of 'starting coordinates'
in least squares there is no way for SurvNet to determine which
points are considered control and which points are preliminary
unadjusted points. So all coordinates found in a raw data file will
be considered control points.
- When a large project is not
processing correctly, it is often useful to divide the project into
several raw data files and debug and process each file separately
as it is easier to debug small projects. Once the smaller projects
are processing separately they can be combined for a final combined
adjustment.
Two Mathematical Models, 2D/1D and 3D
SurvNet gives the user the option to
choose one of two mathematical model options when adjusting raw
data, the 3D model and the 2D/1D model.
In the process of developing SurvNet
numerous projects have been adjusted using both the 2D/1D model and
the 3D model. There are slight differences in final adjusted
coordinates when comparing the results from the same network using
the two models. But in all cases the differences in the results are
typically less than the accuracy of measurements used in the
project. The main difference in terms of collecting raw data for
the two different models is that the 3D model requires that rod
heights and instrument heights need to be measured, and there needs
to be sufficient elevation control to compute elevations for all
points in the survey. When collecting data for the 2D/1D model the
field crews do not need to collect rod heights and instrument
heights.
In the 2D/1D model raw distance
measurements are first reduced to horizontal distances and then
optionally to grid distances. Then a two dimensional
horizontal least squares adjustment is performed on these reduced
horizontal distance measurements and horizontal angles. After the
horizontal adjustment is performed an optional one-dimensional
vertical least squares adjustment is performed in order to adjust
the elevations if there is sufficient data to compute elevations.
The 2D/1D model is the model that has been traditionally been used
in the past by non-geodetic surveyors in the reduction of field
data. There are several advantages to SurvNet's implementation of
the 2D/lD model. One advantage is that an assumed coordinate
system can be used. It is not necessary to know geodetic positions
for control points. Another advantage is that 3D raw data is not
required. It is not necessary to record rod heights and heights of
instruments. Elevations are not required for the control points.
The primary disadvantage of SurvNet's implementation of the 2D/1D
model is that GPS vector data cannot be used in 2D/1D projects.
In the 3D model raw data is not
reduced to a horizontal plane prior to the least squares
adjustment. The 3 dimensional data is adjusted in a single least
squares process. In SurvNet's implementation of the 3D model XYZ
geodetic positions are required for control. The raw data must
contain full 3D data including rod heights and measured heights of
instrument. The user must designate a supported geodetic coordinate
system. The main advantage of using the 3D model is that GPS
vectors can be incorporated into the adjustment.
In the 2D/1D model it is allowed to
mix 2D and 3D measurements. Elevations will be calculated only if
there is enough information in the raw data file to do so. Least
squares adjustment is used for elevation adjustment as well as the
horizontal adjustment. To compute an elevation for the point the
instrument record must have an HI, and the foresight record must
have a rod height, slope distance and vertical angle. If working
with .CGR raw data a 0.0 (zero) HI or rod height is valid. It is
only when the field is blank that the record will be considered a
2D measurement. Carlson SurvCE 2.0 or higher allows you to mix 2D
and 3D data by inserting a 2D or 3D comment record into the .RW5
file. A 3D traverse must also have adequate elevation control in
order to process the elevations. Elevation control can be obtained
from the supplemental control file, coordinate records in the raw
data file, or elevation records in the raw data file. The "Adjust
Elevations" box in the project settings must be checked to adjust
the calculated elevations. If it is unchecked, elevations will
still be calculated if the 3D data is available, but they will not
be adjusted.
SurvNet can also automatically reduce
field measurements to state plane coordinates in either the NAD 83
or NAD 27 coordinate systems. If a grid coordinate system is
selected, the grid scale factor is computed for each individual
line during the reduction. The elevation factor is also computed
for each individual line if there is sufficient elevation data. If
the raw data has only 2D data, the user has the option of defining
a project elevation to be used to compute the elevation factor.
A full statistical report containing the
results of the least squares adjustment is produced and written to
the report (.RPT) file. An error report (.ERR) file is created and
contains any error messages that are generated during the
adjustment. Coordinates can be stored in the following formats:
C&G numeric (*.crd)
C&G alphanumeric
(*.cgc)
Carlson numeric (*.crd)
Carlson alphanumeric
(*.crd)
Autodesk Land Desktop
(*.mdb)
Simplicity (*.zak)
ASCII P,N,E,Z,D,C (*.nez)
A file with the extension .OUT is
always created and contains an ASCII formatted coordinate list of
the final adjusted coordinates formatted suitable for printing.
Additionally an ASCII file with an extension of .NEZ containing the
final adjusted coordinates in a format suitable for input into 3rd
party software that is capable of inputting an ASCII coordinate
file..
SurvNet produces a wealth of
statistical information that allows an effective way to evaluate
the quality of survey measurements. In addition to the least
squares statistical information there is an option to compute
traverse closures during the preprocessing of the raw data.
Traverse closures can be computed for both GPS and total station
traverses. This option has no effect on the computation of final
least squares adjusted coordinates. This option is useful for
surveyors who due to statutory requirements are still required to
compute traverse closures and for those surveyors who still like to
view traverse closures prior to the least squares adjustment.
Raw Data Files and Raw Data Editor Functions
SurvNet works equally well for both
Carlson users and C&G users. The primary difference between the
two users is that a Carlson user will typically be using an .RW5
file for his raw data and a C&G user will typically be using a
.CGR file.
SurvNet is capable of
processing either C&G (.CGR) raw data files or Carlson (.RW5)
raw data files. Measurement, coordinate, elevation and direction
(Brg/Az) records are all recognized. Scale factor records in the
.CGR file are not processed since SurvNet calculates the state
plane scale factors automatically. The menu option
'Settings->Global Settings' displays the following dialog box.
If the 'Use Carlson Utilites' is chosen then the .RW5 editor
will be the default raw editor and Carlson SurvCom will be the
default data collection transfer program. If the 'Use C&G
Utilities' is chosen then the C&G .CGR editor will be the
default raw editor and C&G's data collection transfer program
will be the default data collection transfer program.

Standard Error Records in the Raw Data File
Standard errors are estimated errors
that are assigned to measurements or coordinates. A standard error
is an estimate of the standard deviation of a sample. A higher
standard error indicates a less accurate measurement. The higher
the standard error of a measurement, the less weight it will have
in the adjustment process.
Although you can set default standard errors for the various
types of measurements in the project settings of SurvNet, standard
errors can also be placed directly into the raw data file. A
standard error record inserted into a raw data file applies to all
the measurements following the SE record.The standard error does
not change until another SE record is inserted that either changes
the specific standard error, or sets the standard errors back to
the project defaults. The advantage of entering standard errors
into the raw file is that you can have different standard errors
for the same type measurement in the same job. For example, if you
used a one second total station with fixed backsights and
foresights for a portion of a traverse and a 10 second total
station with backsights and foresights to hand held prisms on the
other portion of the traverse, you would want to assign different
standard errors to reflect the different methods used to collect
the data.
Make sure the SE record is placed before the measurements for
which it applies.
If you do not have standard errors defined in the raw data file,
the default standard errors in the project settings will be applied
to the entire file.
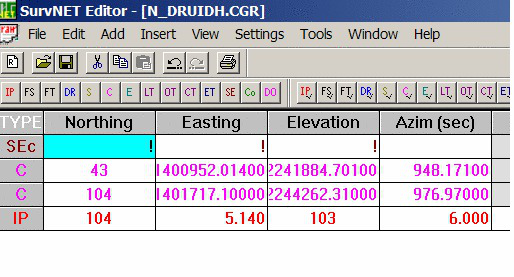
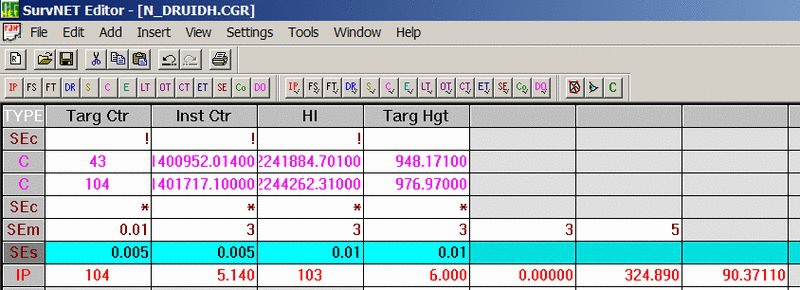
Carlson Raw Data Editor:
The raw data editor can be accessed from the tool bar icon.
Following is an image of the .RW5 editor. Refer to the Carlson raw
editor documentation for guidance in the basic operation of the
editor. The following documentation only deals with topics that are
specific to the .RW5 editor and SurvNet.
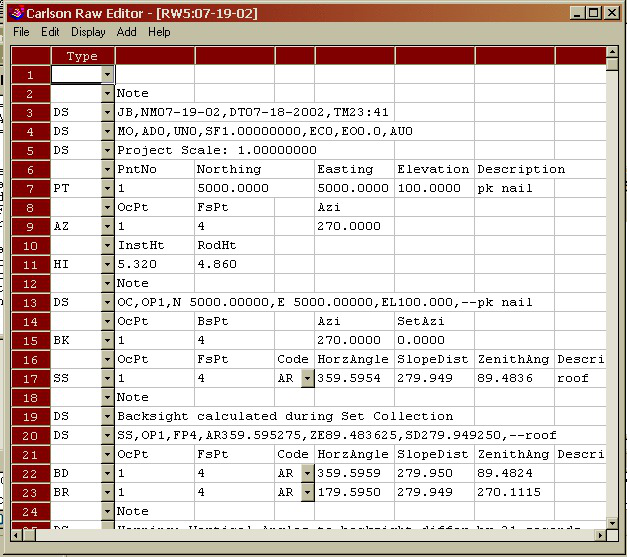
You can insert or add Standard Error records into the raw data
file. Use the 'Add' menu option to insert standard error records
into the raw files.
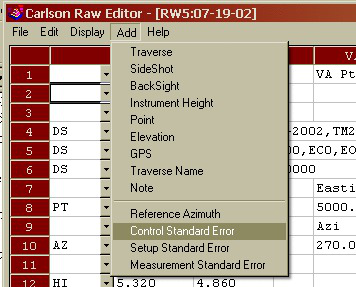
SEc - Control Standard Errors
You can set standard errors for Northing, Easting, Elevation,
and Azimuth using the 'Control Standard Error' menu option. Azimuth
standard errors are entered in seconds. The North, East and
Elevation standard errors affect the PT (coordinate) and EL
(elevation) records.
You can hold the North, East and Elevation fixed by entering a
"!" symbol. You can allow the North, East and Elevation to FLOAT by
entering a "#" symbol. You can also assign the North, East and
Elevation actual values. If you use an "*" symbol, the current
standard error value will return to the project default values.
North East
Elevation
Azim
!
!
!
(Fix all values)
#
#
#
30.0 (Allow the N.,
E. & Elevation to Float)
0.01
0.01
0.03
5.0 (assign values)
*
*
*
* (return the
standard errors back to project defaults)
When you fix a coordinate point, the original value does not
change during the adjustment and all measurements will be adjusted
to fit the fixed point. If you allow a value to float, it will not
be used in the actual adjustment, it will just be used to help
calculate the initial coordinate values required for the adjustment
process. Placing a very high or low standard error on a coordinate
point accomplishes almost the same thing as setting the standard
error as float or fixed. The primary purpose of using a float point
is if SurvNet cannot compute preliminary values, a preliminary
float value can be computed and entered for the point.
Direction records cannot be FIXED or FLOAT. You can assign a low
standard error (or zero to fix) if you want to weight it heavily,
or a high standard error to allow it to float.
In the example below, the first SEc record containing the '!'
character and sets points 103, 204, and 306 to be fixed. The last
SEc record contains the '*' character. It sets the standard errors
for point 478 and any other points that follow to the project
settings. The Azimuth standard error was left blank.
Example:
North
East
Elev Azim
CSE
!
!
!
PT 103 1123233.23491
238477.28654 923.456
PT 204 1124789.84638
239234.56946 859.275
PT 306 1122934.25974
237258.65248 904.957
North
East
Elev Azim
CSE
*
*
*
PT 478 1122784.26874
237300.75248 945.840
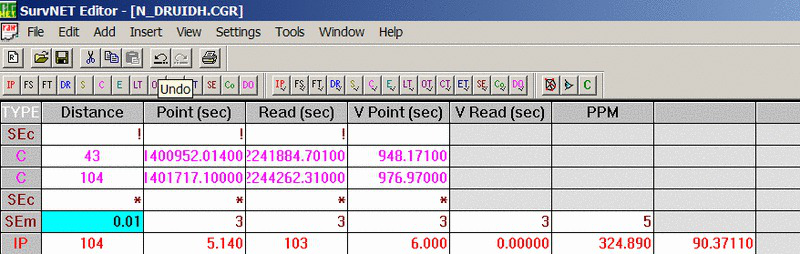
MSE - Measurement Standard Errors
You can set the standard errors for distances, horizontal angle
pointing, horizontal angle reading, vertical angle pointing,
vertical angle reading, and distance constant and PPM.
"Distance" - distance constant and measurement error, can be
obtained from EDM specs, or from performing an EDM calibration on
an EDM baseline, or from other testing done by the user.
"PPM" - Parts per Million, obtain from EDM specs, or from
performing an EDM calibration on an EDM baseline, or from other
testing done by the user.
"Pointing" - total station horizontal angular pointing error in
seconds. This value is an indication of how accurately the
instrument man can point to the target. For example, you may set it
higher in the summer because of the heat waves. Or you may set it
higher for total stations running in Robotic Mode because they
cannot point as well as a manual sighted total station.
"Reading" - total station horizontal angular reading error in
seconds. If you have a 10 second theodolite, enter a reading error
of 10 seconds.
"V.Pointing" - total station vertical angular pointing error in
seconds. This value is an indication of how accurately the
instrument man can point to the target. For example, you may set it
higher in the summer because of the heat waves.
"V.Reading" - total station vertical angular reading error in
seconds. If you have a 10 second theodolite, enter a reading error
of 10 seconds.
Example:
Distance
Point
Read V.Point
V.Read PPM
MSE
0.01
3
3
3
3
5
You can enter any combination of the above values. If you do not
want to change the standard error for a particular measurement
type, leave it blank.
If you use an
"*" symbol, the standard error for that measurement type will
return to the project default values.
SSE - Setup Standard Errors
These standard errors are a measure of how accurately the
instrument and target can be setup over the points.
"Rod Ctr" is the Target Centering error. This value reflects how
accurately the target prism can be set up over the point.
"Inst Ctr" is the Instrument Centering error. This value
reflects how accurately the instrument can be set up over the
point.
"Ints Hgt" is the Instrument Height error. This value reflects
how accurately the height of the instrument above the mark can be
measured.
"Rod Hgt" is the Target Height error. This value reflects how
accurately the height of the prism above the mark can be
measured.
Example:
Rod Ctr Inst
Ctr Inst Ht
Rod Hgt
SSE
0.005
0.005
0.01
0.01
You can enter any combination of the
above values. If you do not want to change the standard error for a
particular measurement type, leave it blank.
If you use an "*" symbol, it will
return the standard error to the project default values.
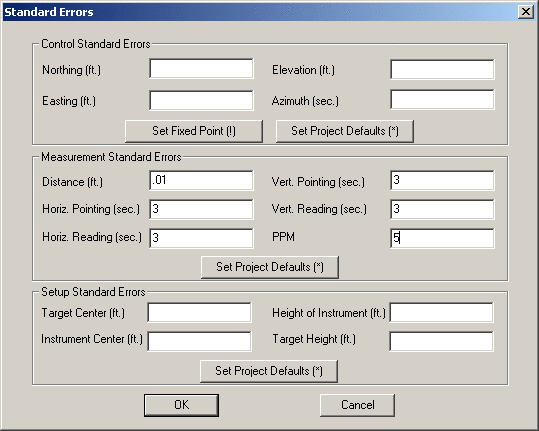
C&G Raw Data Editor:
You can set standard errors for
control, measurements and instrument setup using the
Insert->Standard Error menu option:
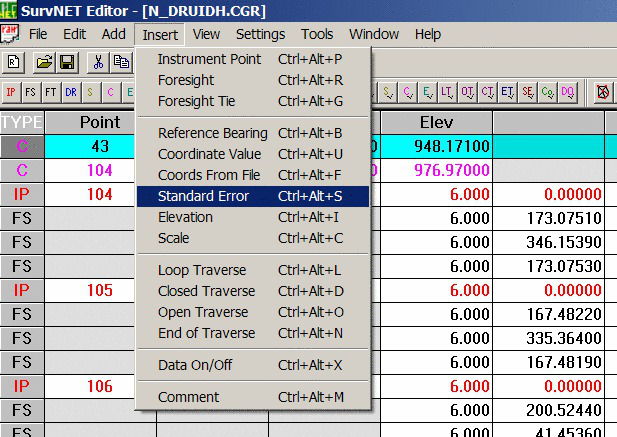
This will open a Standard Error dialog box:
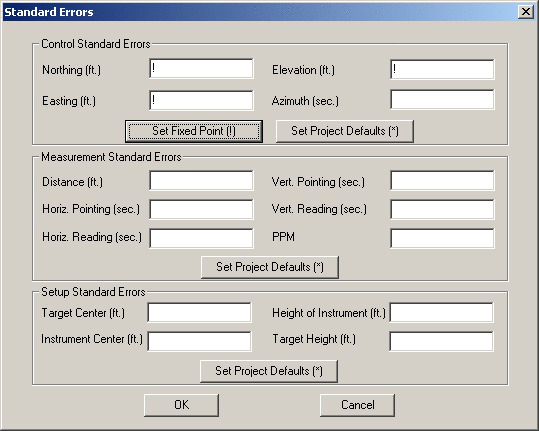
This dialog allows you to create three types of
standard error records: Control, Measurement, and Setup. You need
only enter the values for the standard errors you wish to set. If a
field is left blank no standard error for that value will be
inserted into the raw data file.
You can hold the North, East and Elevation fixed by entering a
"!" symbol (as shown above). You can allow the North, East and
Elevation to FLOAT by entering a "#" symbol. You can also assign
the North, East and Elevation actual values. If you use an "*"
symbol (or press the "Set Project Defaults" button), the current
standard error value will return to the project default values.
In the above example, a Control Standard Error record (SEc) will
be created:
Below are some sample values for control standard errors:
North East
Elevation
Azim
!
!
!
(Fix all values)
#
#
#
30.0 (Allow the N.,
E. & Elevation to Float)
0.01
0.01
0.03
5.0 (assign values)
*
*
*
* (return the
standard errors back to project defaults)
When you fix a coordinate point, the original value does not
change during the adjustment and all other measurements will be
adjusted to fit the fixed point. If you allow a value to float, it
will not be used in the actual adjustment, it will just be used to
help calculate the initial coordinate values required for the
adjustment process. Placing a very high or low standard error on a
measurement accomplishes almost the same thing as setting a
standard error as float or fixed. The primary purpose of using a
float point is if SurvNet cannot compute preliminary values, a
preliminary float value can be computed and entered for the
point.
Direction records cannot be FIXED or FLOAT. You can assign a low
standard error (or zero to fix) if you want to weight it heavily,
or a high standard error to allow it to float.
MSE - Measurement Standard Errors
You can set the standard errors for distances, horizontal angle
pointing, horizontal angle reading, vertical angle pointing,
vertical angle reading, and distance constant and PPM.
"Distance" - distance constant and measurement error, can be
obtained from EDM specs, or from performing an EDM calibration on
an EDM baseline, or from other testing done by the user.
"PPM" - Parts per Million, obtain from EDM specs, or from
performing an EDM calibration on an EDM baseline, or from other
testing done by the user.
"Pointing" - total station horizontal angular pointing error in
seconds. This value is an indication of how accurately the
instrument man can point to the target. For example, you may set it
higher in the summer because of the heat waves. Or you may set it
higher for total stations running in Robotic Mode because they
cannot point as well as a manual sighted total station.
"Reading" - total station horizontal angular reading error in
seconds. If you have a 10 second theodolite, enter a reading error
of 10 seconds.
"V.Pointing" - total station vertical angular pointing error in
seconds. This value is an indication of how accurately the
instrument man can point to the target. For example, you may set it
higher in the summer because of the heat waves.
"V.Reading" - total station vertical angular reading error in
seconds. If you have a 10 second theodolite, enter a reading error
of 10 seconds.
Example:
You can enter any combination of the above values. If you do not
want to change the standard error for a particular measurement
type, leave it blank. If you use an "*" symbol, the standard error
for that measurement type will return to the project default
values.
The following SEm
record will be created:
SSE - Setup Standard Errors
These standard errors are a measure of how accurately the
instrument and target can be setup over the points.
"Target Center" is the Target Centering error. This value
reflects how accurately the target prism can be set up over the
point.
"Instrument Center" is the Instrument Centering error. This
value reflects how accurately the instrument can be set up over the
point.
"Height of Instrument" is the Instrument Height error. This
value reflects how accurately the height of the instrument above
the mark can be measured.
"Target Height" is the Target Height error. This value reflects
how accurately the height of the prism above the mark can be
measured.
Example:
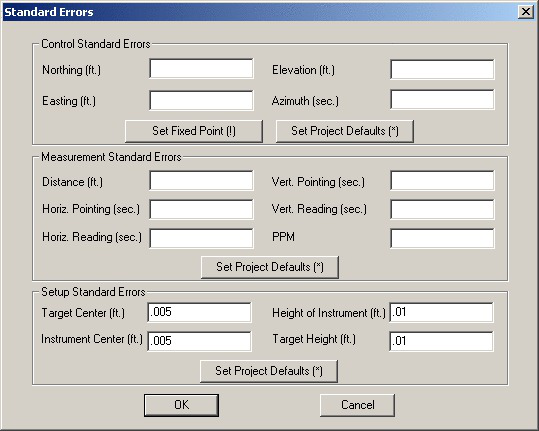
You can enter any combination of the
above values. If you do not want to change the standard error for a
particular measurement type, leave it blank.
If you use an "*" symbol, it will return the standard error to
the project default values.
The following SEs record will be
created:
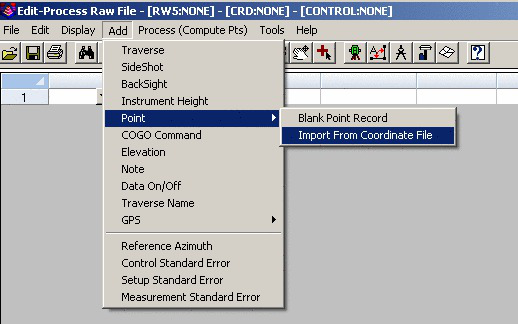
Other important raw data editing features:
There are several other features
available in both the Carlson and C&G editors that are useful
to SurvNet.
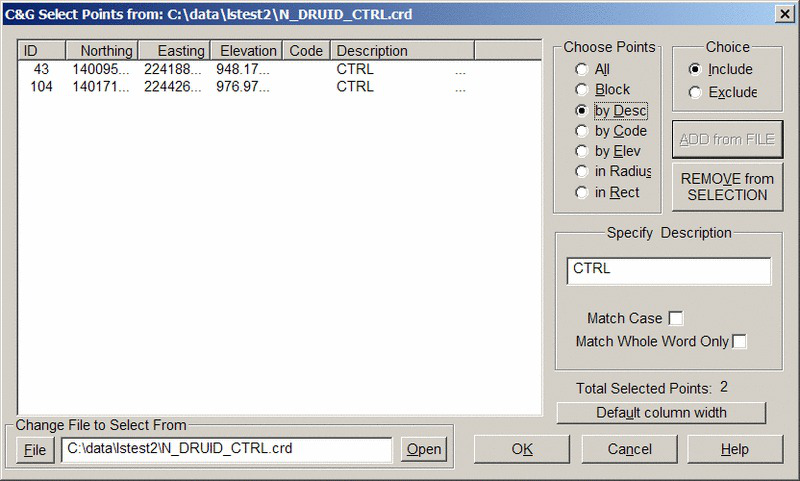
-
Insert Coordinate records from
file- when inputting control into a raw data file, it is
more convenient to read the control point
directly from a coordinate file than it is to manually key
them in. The "Insert Coordinates" function allows you to select
points in a variety of manner making it easy to select just control
points. For example, you can select points by description, code,
point blocks, point number, etc.
C&G editor:

Carlson Editor:
-
Data ON/OFF records- when
trying track down problems, sometimes it is convenient to remove
certain sections of raw data prior to processing. Both the Carlson
and C&G raw data editors have a special record (DO record) that
will turn OFF or ON certain areas of data. For example, when you
insert a DO record all data following that record will be turned
OFF (it will be shown in a different color). When you insert
another DO record further down, the data following it will be turn
back ON. It is simply a toggle.
In the C&G editor
select Insert->Data On/Off. In the Carlson Editor select
Add->Data On/Off
In the example below, the
instrument setup at point 106 backsighting 105 was turned OFF.

Redundant Measurements
One of the benefits of SurvNet
is the ability to process redundant measurements. In terms of total
station data redundant measurement is defined as measuring angles
and/or distances to the same point from two or more different
setups.
It is required that the same
point number be used when locating a point that was previously
recorded. However, since some data collectors will not allow you to
use the same point number if the point already exists, we use the
following convention for collecting redundant points while
collecting the data in the field. If the point description contains
a user defined string, for example a "=" (equal sign) followed by
the original point number, we will treat that measurement as a
redundant measurement to the point defined in the description
field. The user defined character or string is set in the project
settings dialog. For example, if point number 56 has the
description "=12", we will treat it as a measurement to point 12
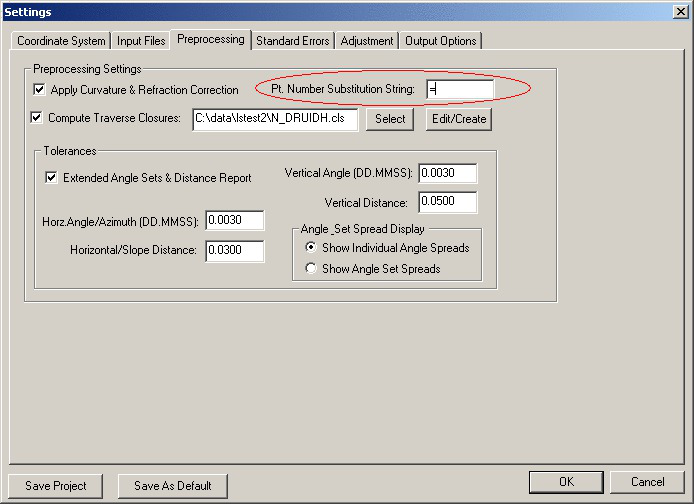
and point 56 will not exist. Make sure the
Preprocessing Settingsdialog box has the
Pt. Number Substitution Stringset to the appropriate
value.
Alternately, the point numbers can be edited after the raw data
has been downloaded from the data collector.
Supplemental Control Files

In order to process a raw data file,
you must have as a minimum a control point and a control azimuth,
or two control points. Control points can be inserted into
the raw data file or alternately control points can be read from
coordinate files. Control points can be read from a variety of
coordinate file types:
C&G or Carlson numeric (.CRD)
files
C&G Alphanumeric coordinate files (*.cgc)
Carlson Alphanumeric coordinate files (*.crd)
Autodesk Land Desktop (*.mdb)
Simplicity coordinate files (*.zak)
ASCII (.NEZ) file
ASCII latitude and longitude (3D model only)
CSV ASCII NEZ with std. errors (only external control file that
allows you to assign standard errors to specific points).
SDMS (.ctl) control file
ASCII Geocentric Coordinates (.xyz) (Earth Centered Earth Fixed
XYZ coordinate values)
The standard errors for the control
points from a supplemental control file will be assigned the
NORTH and EAST standard errors from the project settings dialog
box.
In the ASCII .NEZ file, the
coordinate records need to be in the following format:
Pt. No.,
Northing,
Easting,
Elevation, Description<cr><lf>
103, 123233.23491, 238477.28654,
923.456, Mon 56-7B<CR><LF>
Each line is terminated with
carriage-return <CR> and line-feed <LF> characters.
In the ASCII latitude and longitude
file, the records need to be in the following format:
Pt. No.,
Latitude (NDDD.mmssssss), Longitude (WDDD.mmssssss), Elevation
(Orthometric), Description<cr><lf>
FRKN,N35.113068642,W083.234174724,649.27<CR><LF>
Each line is terminated with
carriage-return <CR> and line-feed <LF> characters.
The major advantage
of putting coordinate control points in the actual raw data file is
that specific standard errors can be assigned to each control point
(as described in the RAW DATA section above). If you do not include
an SE record the standard error will be assigned from the NORTH,
EAST, and ELEVATION standard errors from the project settings
dialog box.
It is not allowed for the supplemental control file and the
final output file to be the same file. Since least squares
considers all points to be control points only control points
should be in a supplemental control file.
Menus
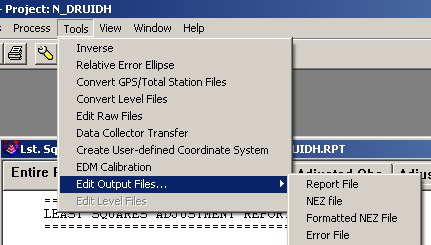
The following
graphic shows the main network least squares window. Most least
squares operations are initiated from this window.

File
Selecting the FILE
menu option opens the following menu:

A Project (.PRJ) file is created in
order to store all the settings and files necessary to reprocess
the data making up the project. You can create a NEW project,
or OPEN an existing project. It is necessary to have a project open
in order to process the data.
The "Save Project As Default" can be
used to create default project settings to be used when creating a
new project. The current project settings are saved and will be
used as the default settings when any new project is created.
Project Settings
The project settings are set by
selecting Settings > Project from the menu, or pressing the SE
icon on the tool bar. The project settings dialog box has six
tabbed windows, Coordinate System, Input Files, Preprocessing,
Adjustment, Standard Errors, and Output Options. Following is an
explanation of the different project settings tabbed windows.

Coordinate System:
The Coordinate System tab contains
settings that relate to the project coordinate system, the
adjustment model and other geodetic settings.
You can select either the 3D model or
the 2D/1D mathematical model. If you choose 2D/1D mathematical
model you can choose to only perform a horizontal adjustment, a
vertical adjustment or both. In the 3D model both horizontal and
vertical are adjusted simultaneously. The 3D model requires that
you choose a geodetic coordinate system. Local, assumed coordinate
systems cannot be used with the 3D model. GPS vectors can only be
used when using the 3D model.
If using the 2D/1D mathematical model
you can select Local (assumed coordinate system), or a geodetic
coordinate system such State Plane NAD83, State Plane NAD27, UTM,
or a user-defined coordinate system as the coordinate system. When
using the 3D model you cannot use a local system.
Select the 'Horizontal Units for'
output of coordinate values (Meters, US Feet, or International
Feet). In the 3D model both horizontal and vertical units are
assumed to be the same. In the 2D/1D model horizontal and vertical
units can differ. The 'Horizontal unit' setting in this screen
refers to the output units. It is permissible to have input units
in feet and output units in meters. Input units are set in the
'Input Files' tabbed screen.
If you choose SPC 1983, SPC 1927, or
UTM, the appropriate zone will need to be chosen. The grid
scale factor is computed for each measured line using the method
described in section 4.2 of NPAA Manual NOS NGS 5, "State Plane
Coordinate System of 1983", by James E. Stem.
If using the 2D/1D model and you
select a geodetic coordinate system, you have a choice as to how
the elevation factor is computed. You can choose to either enter a
project elevation or you can choose to have elevations factors
computed for each distance based on computed elevations. In order
to use the 'Compute Elevation from Raw Data' all HI's and
foresight rod heights must be collected for all points.
If you choose a geodetic coordinate
system and are using the 2D/1D model you will want to select
"Project Elevation" if any of your raw data measurements are
missing any rod heights or instrument heights. There must be enough
information to compute elevations for all points in order to
compute elevation factors. For most survey projects it is
sufficient to use an approximate elevation, such as can be obtained
from a Quad Sheet for the project elevation.
Geoid Modeling
If you are using either the 3D
or the 2D/1D adjustment model using non-local coordinate
system you must choose a geoid modeling method. A project
geoid separation can be entered or the grid model can be selected
from a list of models. The project must fall within the geographic
range of the geoid grid files.
Geoid modeling is used as follows.
Entering a 0.0 value for the separation is the method to use if you
wish to ignore the geoid separation. In the 2D, 1D model it is
assumed that elevations entered as control are entered as
orthometric heights. Since grid reduction requires the data be
reduced to the ellipsoid, the geoid separation is used to compute
ellipsoid elevations. The difference between using geoid modeling
and not using geoid modeling or using a project geoid separation is
insignificant for most surveys of limited extents.
In the 3D model it is also assumed
that elevations entered as control are orthometric heights. Since
the adjustment is performed on the ellipsoid, the geoid separation
is used to compute ellipsoid elevations prior to adjustment. After
the adjustment is completed the adjusted orthometric elevations
will be computed from the adjusted ellipsoid elevations and the
computed geoid separation for each point.
If you choose one of the geoid models
from the list, the geoid separations are computed by interpolation
with data points retrieved from geoid separation files. The geoid
separation files should be found in the primary the
installation directory. Grid files have an extension of .grd. These
files can be downloaded from the Carlson website
(www.carlsonsw.com). If you pick a geoid model that is not on your
computer, SurvNET will automatically connect to the Carlson website
and download the specific geoid model.
If you choose to enter a project
geoid separation the best way to determine a project geoid
separation is by using the NGS on-line Geodetic Toolkit. Enter a
latitude and longitude of the project midpoint and the program will
output a project separation.
Working With User-defined Coordinate Systems
SurvNet allows the creation of
user-defined geodetic coordinate systems (UDP). The ability to
create user-defined coordinate system allows the user to create
geodetic coordinate systems based on the supported projections that
are not explicitly supported by SurvNet. A SurvNet user-defined
coordinate system consists of an ellipsoid, and a map projection,.
The ellipsoid can be one of the explicitly supported ellipsoids or
a user-defined ellipsoid. The supported map projections are
Transverse Mercator, Lambert Conformal Conic with 1 standard
parallel, Lambert Conformal Conic with 2 standard parallels,
Oblique Mercator, and Double Stereographic projection. User-defined
coordinate systems are created, edited, and attached to a project
from the Project Settings 'Coordinate System' dialog box. To attach
an existing UDP file, *.udp, to a project use the 'Select' button.
To edit an existing UDP file or create a new UDP file use the
'Edit' button.

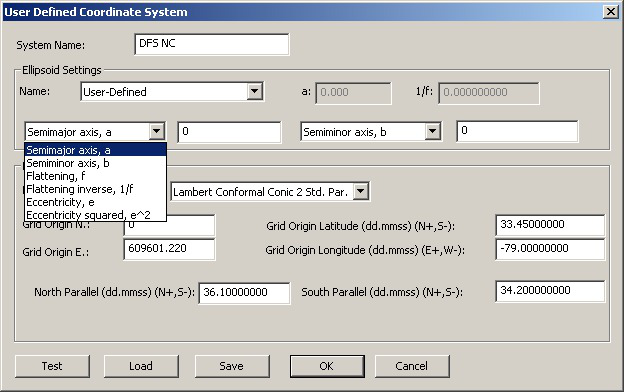
The following dialog box is used to create the user-defined
coordinate system. The ellipsoid needs to be defined and the
appropriate map projection and projection parameters need to be
entered. The appropriate parameter fields will be displayed
depending on the projection type chosen.

Test- Use the 'Test' button to enter a known latitude and
longitude position to check that the UDP is computing correct grid
coordinates. Following is the test UDP dialog box. Enter the known
lat/long in the top portion of the dialog box then press
'Calculate' and the computed grid coordinates will be displayed in
the 'Results' list box.

Load-Use the 'Load' to load the coordinate system parameters
from an existing UDP.
Save- Use the 'Save' button to save the displayed UDP. The
'Save' button prompts the user to enter the UDP file name.
OK -Use the 'OK' button to save the UDP using the existing
file name and return to the 'Coordinate System' dialog box.
Cancel -Use the 'Cancel' button to return to the 'Coordinate
System' dialog box without saving any changes to the UDP file.
If you need to define an ellipsoid chose the 'User-Defined'
ellipsoid option. With the user-defined ellipsoid you will then
have the option to enter two of the ellipsoid parameter.
Input Files

Raw Data Files:Use the 'Add' button to insert raw total
station files into the list. Use the 'Delete' button to remove raw
files from the list. All the files in this list are included in the
least squares adjustments. Having the ability to choose multiple
files allows one to keep control in one file and measurements in
another file. Or different files collected at different times can
be processed all at one time. If you have multiple crews working on
the same project using different equipment, you can have
"crew-specific" raw data files with standard error settings for
their particular equipment. Having separate data files is also a
convenient method of working with large projects. It is often
easier to debug and process individual raw files. Once
the individual files are processing correctly all the files can be
included for a final adjustment. You can either enter C&G
(.CGR) raw files or Carlson (.RW5) files into the list for
processing. You cannot have both .CGR and .RW5 files in the same
project to be processed at the same time. Notice that you have the
ability to highlight multiple files when deleting file.
Note that if you are processing
Carlson RW5 total station files, you have the option of including
GPS vectors that can be collected by SurvCE and stored in the RW5
file. Alternatively you can select the RW5 file in the GPS vector
section. If the "Include any GPS vectors" option in the Total
Station Data Files section is checked, the Base Point records in
the RW5 file will be brought in as control automatically. If you
are processing the RW5 file in the GPS vector section you must
define the control separately.
Level Raw Files:Differential and Trig level files can be
entered and processed. Differential or Trig Level raw files have an
.TLV extension and are created using the Carlson level editor.
GPS Vector Files:GPS vector files can be entered and
processed. Both GPS vector files and total station raw files can be
combined and processed together. You must have chosen the 3D
mathematical model in the Coordinate System tab in order to include
GPS vectors in the adjustment.
Currently, the following GPS vector
file formats are supported.
ASCII (StarNet): See below for
more information on StarNet format. These files typically have .GPS
extensions.
Ashtech/Thales 'O' files: Typically have .obn extensions and
are binary files.
Carlson .RW5 (containing GPS vectors)
GeoLab IOB
LandXML, (*.xml)
Leica: Leica files are ASCII files.
NGS G-File
NGS G-File from OPUS report
Topcon (.tvf): Topcon .tvf files are ASCII files.
Topcon (.xml): Topcon also can output their GPS vectors in XML
format which is in ASCII format.
Trimble Data Exchange Format (.asc): These files are in ASCII
format
Trimble data collection (.dc): These files are ASCII.
Trimble LandXML, (*.jxl)
The following is a typical vector
record in the StarNet ASCII format. GPS vectors typically consist
of the 'from' and 'to' point number, the delta X, delta Y, delta Z
values from the 'from' and 'to' point, with the XYZ deltas being in
the geocentric coordinate system. Additionally the
variance/covariance values of the delta XYZ's are included in the
vector file.
.GPS WEIGHT COVARIANCE
C PRS34452 1305780.345005 -4667085.299019 4132689.544939
0.005000 0.005000 0.005000 --MON
C UCNJ 1305780.345005 -4667085.299019 4132689.544939 0.00000100
0.00000100 0.00000100 --MON
G1 UCNJ-1000 8399.71318061
-4742.15645068 -8036.07224424 --MNS
G2 3.939428e-006 2.474560e-005
1.160301e-005
G3 3.924536e-006 -3.360765e-006 -1.028503e-006
G1 UCNJ-1001 8328.15569476
-4796.59445569 -8072.25948922 --MNS
G2 9.596618e-007 1.687749e-005
1.936038e-006
G3 1.176891e-007 -8.668020e-009 -4.798408e-006
The first line defines what values
are in the G2 and G3 records. It can be either GPS WEIGHT
COVARIANCE (G2 is Variance, G3 is Covariance), or GPS WEIGHT
STDERRCORRELATION (G2 is standard error, G3 is standard error
correlation). This line is optional; the default is COVARIANCE.
The next two lines are coordinate
control records. These records are also optional. If used, they
must be Geocentric Coordinates (XYZ) in metric units. The format is
as follows:
C
PointName X Y Z StdErrX StdErrY
StdErrZ --PointDescription
The standard errors and point
description are optional.
The GO record is a comment.
The G1 record includes the 'from' and
'to' point and the delta X, delta Y, and delta Z in the geocentric
coordinate system and an optional description of the rover point.
The G2 record is the variance (or
standard error) of X,Y, and Z. The G3 record contains the
covariance (or standard error correlation) of XY, ZX,
and ZY. Most all GPS vector files contain the same data
fields in different formats.
Use the 'Add' button to insert GPS
vector files into the list. Use the 'Remove' button to remove GPS
vector files from the list. All the files in this list will be used
in the least squares adjustments. All the GPS files in the list
must be in the same format. If the GPS file format is ASCII you
have the option to edit the GPS vector files. The Edit option
allows the editing of any of the ASCII GPS files using Notepad.
Typically, only point numbers or point descriptions would be
edited. The variance/covariance values are used to determine the
weights that the GPS vectors will receive during the adjustment and
are not typically edited.
Supplemental Control File: The supplemental control file
option allows the user to designate an additional coordinate file
to be used as control. The supplemental control files can be from a
variety of different file types.
C&G or Carlson numeric (.CRD)
files
C&G Alphanumeric coordinate files (*.cgc)
Carlson Alphanumeric coordinate files (*.crd)
Autodesk Land Desktop (*.mdb)
Simplicity coordinate files (*.zak)
ASCII (.NEZ) file
ASCII latitude and longitude (3D model only)
CSV ASCII NEZ with std. errors (only external control file that
allows you to assign standard errors to specific points).
SDMS (.ctl) control file
ASCII Geocentric (.xyz) (Geocentric coordinates XYZ in metric
units)
Note:You will not be allowed to use the same file for
supplemental control points and for final output. Least squares
considers all points to be measurements. If the output file is also
used as a supplemental control file then after the project
has been processed all the points in the project would now be
in the control file and all the points in the file would now be
considered control points if the project was processed again. The
simplest and most straight-forward method to define control for a
project is to include the control coordinates in a raw data
file.
Preprocessing
The Preprocessing tab contains
settings that are used in the preprocessing of the raw data.

Apply Curvature and Refraction Corrections:Check this box if
you wish to have the curvature refraction correction applied in the
2D/1D model when reducing the slope distance/vertical angle to
horizontal distance and vertical distance. Curvature/refraction
primarily impacts vertical distances.
Tolerances:When sets of angles and/or distances are measured
to a point, a single averaged value is calculated for use in the
least squares adjustment. You may set the tolerances so that a
warning is generated if any differences between the angle
sets or distances exceed these tolerances. Tolerance warnings will
be shown in the report (.RPT) and the (.ERR) file after processing
the data.
If you check the
Extended Angle Sets & Distance Reportoption, all the
sets will be shown with the difference between the high angle and
low angle, and the difference between the high distance and low
distance. If this option is not checked ONLY the sets that exceed
the tolerances will be shown in the report.
Horz./Slope Dist Tolerance:This value sets the tolerance
threshold for the display of warnings if the difference between
highest and lowest horizontal distance exceeds this value. In
the 2D model it is the horizontal distances that are being
compared. In the 3D model it is the slope distances that are being
compared.
Vert. Dist Tolerance:This value sets the tolerance threshold
for the display of a warning if the difference between highest and
lowest vertical difference component exceeds this value (used in 2D
model only).
Horz. Angle Tolerance:This value sets the tolerance
threshold for the display of a warning if the difference between
the highest and lowest horizontal angle exceeds this value.
Vert. Angle Tolerance: This value sets the tolerance threshold
for the display a warning if the difference between the highest and
lowest vertical angle exceeds this value (used in 3D model only).
Angle Set Spred Display:You can choose to see the splits of
individual angles in each set (2 per set), or just the splits of
all the sets combined (high / low angle of all the sets combined).
Compute Traverse Closures:Traditional traverse closures can
be computed for both GPS and total station traverses. This option
has no effect on the computation of final least squares adjusted
coordinates. This option is useful for surveyors who due to
statutory requirements are still required to compute traditional
traverse closures and for those surveyors who still like to view
traverse closures prior to the least squares adjustment. This
option is used to specify a previously created closure file.
To use this option the user has to
first create a traverse closure file. The file contains a .cls
extension. The traverse closure file is a file containing an
ordered list of the point numbers comprising the traverse. Since
the raw data for SurvNet is not expected to be in any particular
order it is required that the user must specify the points and the
correct order of the points in the traverse loop. Both GPS and
angle/distance traverses can be defined in a single traverse
closure file. More details on creating the traverse closure files
follow in a later section of this manual.
Pt. Number Substitution String:This option is used to
automatically renumber point names. Some data collectors do not
allow the user to use the same point number twice during data
collection. In least squares it is common to collect measurements
to the same point from different locations. If the data collector
does not allow the collection of data from different points using
the same point number this option can be used to automatically
renumber these points during processing. For example you could
enter the string '=' in the Pt. Number Substitution String. Then if
you shot point 1 but had to call it something else such as 101 you
could enter '=1' in the description field and during preprocessing
point 101 would be renumbered as point '1'.
Standard Errors

Standard errors are the expected
measurement errors based on the type equipment and field procedures
being used. For example, if you are using a 5 second total station,
you would expect the angles to be measured within +/- 5 seconds
(Reading error).
The Distance Constant, PPM settings, and Angle Reading should
be based on the equipment and field procedures being used. These
values can be obtained from the published specifications for the
total station. Or the distance PPM and constant can be computed for
a specific EDM by performing an EDM calibration using an EDM
calibration baseline.
Survey methods should also be taken
into account when setting standard errors. For example, you might
set the target centering standard error higher when you are
sighting a held prism pole than you would if you were sighting a
prism set on a tripod.
The settings from this dialog box
will be used for the project default settings. These default
standard errors can be overridden for specific measurements by
placing SE records directly into the Raw Data File (see the above
section on raw data files).
If the report generated when you
process the data shows that generally you have consistently high
standard residuals for a particular measurement value (angles,
distances, etc.), then there is the chance that you have selected
standard errors that are better than your instrument and methods
can obtain. (See explanation of report file). Failing the
chi-square test consistently is also an indication that the
selected standard errors are not consistent with the field
measurements.
You can set the standard errors for
the following:
Distance and Angle Standard Errors
Distance Constant:Constant portion of the distance error.
This value can be obtained from published EDM specifications, or
from an EDM calibration.
Distance PPM:Parts per million component of the distance
error. This value can be obtained from published EDM specification,
or from an EDM calibration.
Horizontal Angle Pointing:The horizontal angle pointing
error is influenced by atmospheric conditions, optics, experience
and care taken by instrument operator.
Horizontal Angle Reading:Precision of horizontal angle
measurements, obtain from theodolite specs.
Vertical Angle Pointing:The vertical angle pointing error is
influenced by atmospheric conditions, optics, experience and care
taken by instrument operator.
Vertical Angle
Reading
:Precision of vertical angle measurements, obtain from
theodolite specs.
Instrument and Target Standard Errors
Target Centering:This value is the expected amount of error
in setting the target or prism over the point.
Instrument Centering:The expected amount of error in setting
the total station over the point.
Target Height:The expected amount of error in measuring the
height of the target.
Instrument Height:The expected amount of error in measuring
the height of the total station.
Control Standard Errors
Direction (Bearing / Azimuth):The estimated amount of error
in the bearing / azimuth (direction) found in the azimuth records
of the raw data.
North, East, Elev:The estimated amount of error in the
control north, east and elevation values. You may want to have
different coordinate standard errors for different methods of
obtaining control. For example, standard errors of control derived
from RTK GPS would be higher than control derived from GPS static
measurements.
GPS Standard Errors
Instrument Centering:This option is used to specify the
error associated with centering a GPS receiver over a point.
Vector Standard Error Factor:This option is used as a factor
to increase GPS vector standard errors as found in the input GPS
vector file. Some people think that the GPS vector
variances/covariances as found in GPS vector files tend do be
overly optimistic. This factor allows the user to globally increase
the GPS vector standard errors without having to edit the GPS
vector file. A factor of 0 is the default value and results in no
change to the GPS vector standard errors as found in the GPS vector
file. Acceptable values are 0 through 9.
It is not a linear progression.
Differential Leveling Standard Errors
These setting only effect level data
and are not used when processing total station or GPS vector
files.
Avg, Dist. To BS/FS:This option is used to define the
average distance to the backsight and foresight during
leveling.
Rod
Reading
Error per 100 ft./m:This option is used to define the
expected level reading error.
Collimation Error:This is the expected differential leveling
collimation error in seconds.
Standard Error Definition Files
The Standard
error settings can be saved and then later reloaded into an
existing or new project. Creating libraries of standard errors for
different types of survey equipment or survey procedures is
convenient method of creating standards within a survey department
that uses a variety of equipment and performs different types of
surveys.
Standard error
library files (.sef) can be created two ways. From the
'Settings/Standard Errors' dialog box the 'Load' button can be used
to import an existing .sef file into the current project. A .sef
file can also be created from the existing project standard errors
by using the 'Save As..' button.

Standard error
files (.sef) can also be managed from the main 'Files' menu. Use
the 'Edit Standard Error File' menu option to edit an existing
standard error file. Use the 'New Standard Error File' option to
create a new standard error file.

After choosing
one of the menu options and choosing the file to edit or create,
the following dialog box will be shown. Set the desired standard
errors and press the 'OK' button to save the standard error
file.

Adjustment

Maximum Iterations:Non-linear least squares is an iterative
process. The user must define the maximum number of iterations to
make before the program quits trying to find a converging solution.
Typically if there are no blunders in the data the solution will
converge in less than 5 iterations.
Convergence Threshold:During each iteration corrections are
computed. When the corrections are less than the threshold value
the solution has converged. This value should be somewhat less than
the accuracy of the measurements. For example, if you can only
measure distances to the nearest .01' then a reasonable convergence
threshold value would be .005'.
Confidence Interval:This setting is used when calculating
the size of error ellipses, and in the chi-square testing. For
example, a 95% confidence interval means that there is a 95% chance
that the error is within the tolerances shown.
Enable sideshots for relative error ellipses:Check this box
if you want to see the error ellipses and relative error ellipses
of sideshots. This checkbox must be set if you want to use the
"relative error ellipse inverse" function with sideshots. When
turned off this toggle filters out sideshots during the least
squares processing. Since the sideshots are excluded form the least
squares processing error ellipses cannot be computed for these
points. When this toggle is off, the sideshots are computed after
the network has been adjusted. The final coordinate values of the
sideshots will be the same regardless of this setting.
Large numbers of sideshots slow down
least squares processing. It is best to uncheck this box while
debugging your project to avoid having to wait for the computer to
finish processing. After the project processes correctly you may
turn on the option for the final processing.
Note:
Any sideshots that are selected for the ALTA report will
automatically be included in the adjustment process in order to
calculate the error ellipses - even if this option is turned OFF.
Even if you do not need ALTA report, this is an easy way to get
statistics on only selected sideshots which can greatly speed up
the adjustment process.
Relative Err. Points File:The ALTA standards require that
surveyors certify to the relative positional error between points.
Relative error ellipses are an accepted method of determining the
relative positional error required by the ALTA standards. The
points that are to be included in the relative error checking are
specified by the user. These points are defined in an ASCII file
with an extension of .alt. To select an .alt file for relative
error checking use the 'Select' button and then browse to the
file's location.
There is a section later in the
manual that describes how to create and edit the .alt file.
Include ALTA tolerance report:Turn this toggle on if you
wish to include the ALTA tolerance section of the report.
Allowable Tolerance,
PPM: These fields allow the user to set the allowable error
for computations. Typically the user would enter the current ALTA
error standards, i.e. 0.07' & 50 PPM. Many states are adopting
similar certifications to the ALTA standards. These certifications
may have different tolerances depending on the type of survey (for
example rural vs. urban).
See the later section in this manual
for more detailed information on creating and interpreting the ALTA
section of the report.
Output Options
These settings apply to the output of
data to the report and coordinate files.

Display Precision
These settings determine the number of decimal places
to display in the reports for the following types of data.
The display precision has no effect on any computations, only
the display of the reports.
Coordinates (North, East, Elevation)
- Chose 0-4 decimal places.
Distances - Chose 0-4 decimal places
Directions (Azimuths or Bearings) - nearest second, tenth of
second, or hundredth of second.
Format
These settings determine the format
for the following types of data.
Direction- Choose either bearings or azimuth for direction
display. If the angle units are degrees, bearings are entered as
QDD.MMSSss and azimuths are entered as DDD.MMSSss. If the angle
units are grads, bearings are input as QGGG.ggggg and azimuths are
input as GGG.ggggg.
Coordinate Display- Choose the order of coordinate display,
either north-east or east-north.
Null Elevation- Choose the value for null elevations in the
output ASCII coordinate NEZ file. The Null Elevation field defaults
to SurvNet’s value for NO ELEVATION. This is used to differentiate
between NO ELEVATION (a true 2D point) and ZERO ELEVATION (which is
a vaild elevation)
Angle Display- Choose the units you are working in: degrees
or gradians.
Coordinate File Output
These settings determine the type and
format of the output NEZ file. An ASCII .NEZ and .OUT files are
always created after processing the raw data. The .OUT file will be
a nicely formatted version of the .NEZ file. The .NEZ file will be
an ASCII file suitable to be input into other programs. There are a
variety of options for the format of the .NEZ file. Following are
the different ASCII file output options.
P,N,E,Z,CD,DESC (fixed columns); -
Point,north,east,elev.,code,desc in fixed columns separated by
commas.
P,N,E,Z,CD,DESC;
Point,north,east,elev.,code,desc separated by commas.
P N E Z CD DESC (fixed columns);
Point,north,east,elev.,code,desc in fixed columns with no
commas.
P N E Z CD DESC;
Point,north,east,elev.,code,desc in fixed columns with no
commas.
P,N,E,Z,DESC (fixed columns);
Point,north,east,elev., desc in fixed columns separated by
commas.
P,N,E,Z,DESC; Point,north,east,elev.,
desc separated by commas.
P N E Z DESC (fixed columns);
Point,north,east,elev., desc in fixed columns with no commas.
P N E Z DESC;
Point,north,east,elev.,code,desc separated by spaces.
P,E,N,Z,CD,DESC (fixed columns); -
Point,east,north,elev.,code,desc in fixed columns separated by
commas.
P,E,N,Z,CD,DESC;
Point,east,north,elev.,code,desc separated by commas.
P E N Z CD DESC (fixed columns);
Point,east,north,elev.,code,desc in fixed columns with no
commas.
P E N Z CD DESC;
Point,east,north,elev.,code,desc in fixed columns with no
commas.
P,E,N,Z,DESC (fixed columns);
Point,east,north,elev., desc in fixed columns separated by
commas.
P,E,N,Z,DESC; Point,east,north,elev.,
desc separated by commas.
P E N Z DESC (fixed columns);
Point,east,,northelev., desc in fixed columns with no commas.
P E N Z DESC;
Point,east,north,elev.,code,desc separated by spaces.
CSV ASCII with
Standard Errors
You can also set the output precision
of the coordinates for the ASCII output file. This setting only
applies to ASCII files, not to the C&G or Carlson binary
coordinate files which are stored to full double precision.
* N/E Precision: number of places
after the decimal to use for North and East values (0 -> 8) in
the output NEZ ASCII file.
* Elevation Precision: number
of places after the decimal to use for Elevation values (0 -> 8)
in the output NEZ ASCII file.
Output to Carlson/C&G
coordinate files:
If you want to write the calculated
coordinates directly to a C&G or Carlson coordinate file, check
the "Write to Coordinate File" box and select the file. You can
choose the type of Carlson/C&G file to be created when you
'select' the file to be created. You may wish to leave this box
unchecked until you are satisfied with the adjustment. Following
are the different available coordinate output file options.

Output to
Carlson/C&G Scaled Coordinate File:
You are
also allowed to output coordinates to a second, scaled or ground,
coordinate file. Check the "Create Scaled/Ground NEZ file" box (see
below):

If you are
working with a LOCAL coordinate system, You will see the above
options. You will only be allowed to manually enter a scale factor.
You can select the output file format and the output file.
If you are working in a non-local coordinate system (ie. 1983
State Plane), you will have the following scaling options:

You can either enter a scale factor
or use the computed grid to ground scale factor. If you select to
use the computed scale factor, SurvNET will use the "average
combined scale factor" as shown in the project report file.
You will also be required to enter the point number of the
point you will be scaling around. This function can also be used as
a translation tool. You can either "Use the Current NE values" (no
translation), "Enter the new NE values" (desired N and E values for
the scaling point), or "Enter Translation Values" (enter the actual
delta-north and delta-east values).
Overwriting exiting points:
* NOTE: If coordinate points already exist in the CRD file,
before a point is written, you will be shown the NEW value, the OLD
value, and given the following option:
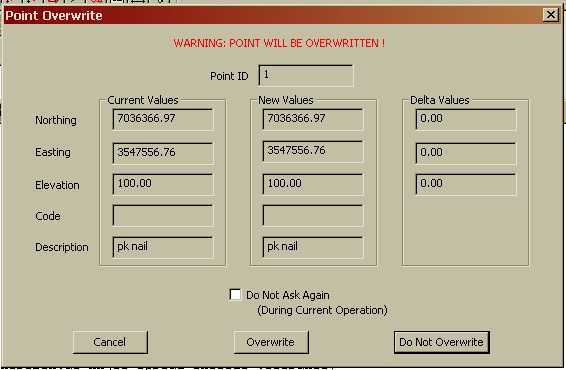
Cancel:Cancel the present operation. No more points will be
written to the Carson/C&G file.
Overwrite:Overwrite the existing point. Notice that if you
check the 'Do Not Ask Again' box all further duplicate points will
be overwritten without prompting.
Do not Overwrite:The existing point will not be overwritten.
Notice that if you check the 'Do Not Ask Again' box all further
duplicate points will automatically not be overwritten - only new
points will be written.
Process
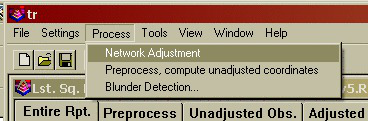
When you select Process >
Network Adjustmentfrom the menu, or select the NETWORK ICON
on the tool bar, the raw data will be processed and adjusted using
least squares based on the project settings. If there is a problem
with the reduction, you will be shown error messages that will help
you track down the problem. Additionally a .err file is created
that will log and display error and warning messages.
The data is first preprocessed to
calculate averaged angles and distances for sets of angles and
multiple distances. For a given setup, all multiple angles and
distances to a point will be averaged prior to the adjustment. The
standard error as set in the Project Settings dialog box is the
standard error for a single measurement. Since the average of
multiple measurements is more precise than a single measurement the
standard error for the averaged measurement is computed using the
standard deviation of the mean formula.
Non-linear network least squares
solutions require that initial approximations of all the
coordinates be known before the least squares processing can be
performed. So, during the preprocessing approximate coordinate
values for each point are calculated using basic coordinate
geometry functions. If there is inadequate control or an odd
geometric situations SurvNet may generate a message indicating that
the initial coordinate approximations could not be computed. The
most common cause of this problem is that control has not been
adequately defined or there are point numbering problems.
Side Shots are separated from the raw
data and computed after the adjustment (unless the "Enable
sideshots for relative error ellipses" toggle is checked in the
adjustment dialog box). If side shots are filtered out of the least
squares process and processed after the network is adjusted,
processing is greatly speeded up, especially for a large project
with a lot of side shots.
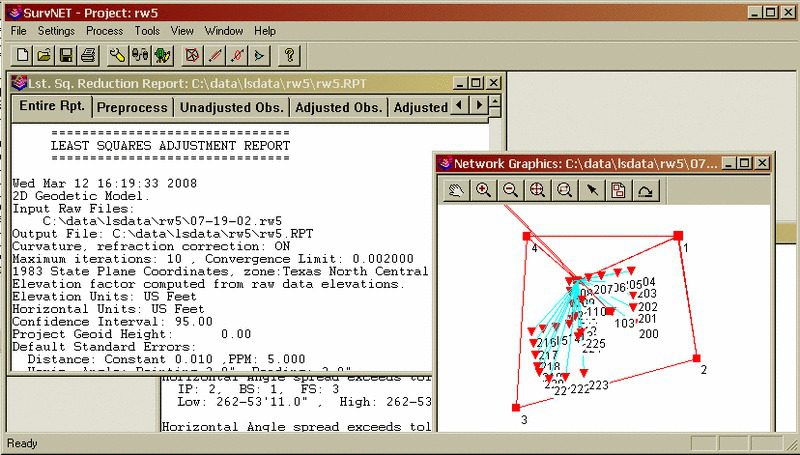
If the raw data processes completely,
a report file, .RPT, a .NEZ file, an .OUT file, and an .ERR file
will be created in the project directory. The file names will
consist of the project name plus the above file extensions. These
different files are shown in separate windows after processing.
Additionally a graphic window of the network is displayed.
.RPT file:This is an ASCII file that contains the
statistical and computational results of the least squares
processing.
.NEZ file:This file is an ASCII file containing the final
adjusted coordinates. This file can be imported into any program
that can read ASCII coordinate files. The format of the file is
determined by the setting in the project settings dialog box.
.OUT file:The .OUT file is a formatted ASCII file of the
final adjusted coordinates suitable for display or printing
.ERR file:The .ERR file contains any warning or error
messages that were generated during processing. Though some warning
messages may be innocuous it is always prudent to review and
understand the meaning of the messages.
The following is a graphic of the
different windows displayed after processing. Notice that with the
report file you can navigate to different sections of the report
using the Tabs at the top of the window.
If you have "Write to Coordinate
File" checked in the output options dialog, the coordinates will
also be written to a .CRD file.
Analysis Tools
Inverse Button -The 'Inverse' button is found on the main
window (the button with the icon that shows a line with points at
each end). You can also select the Tools->Inverse menu option.
This feature is only active after a network has been processed
successfully. This option can be used to obtain the bearing and
distance between any two points in the network. Additionally the
standard deviation of the bearing and distance between the two
points is displayed.
The
Relative Error Ellipse Inversebutton is found on the main
window (the button with the icon that shows a line with an ellipse
in the middle). You can also select the Tools >
Relative Error Ellipsemenu option. This feature is only
active after a network has been processed successfully. This option
can be used to obtain the relative error ellipse between any
two points. It shows the semi-major and semi-minor axis and the
azimuth of the error ellipse, computed to a user-define confidence
interval. This information can also be used to determine the
relative precision between any two points in the network. It is the
relative error ellipse calculation that is the basis for the ALTA
tolerance reporting. If the 'Enable sideshots for relative
error ellipses' toggle is checked then all points in the project
can be used to compute relative error ellipses. The trade-off is
that with large projects processing time will be increased.
The inverse functions are only
allowed after the project has been processed.

If you need to certify as to the
"Positional Tolerances" of your monuments, as per the ALTA
Standards, use the Relative Error Ellipse inverse routine to
determine these values, or use the specific ALTA tolerance
reporting function as explained later in the manual.
For example, if you must certify that
all monuments have a positional tolerance of no more than 0.07 feet
with 50 PPM at a 95 percent confidence interval, first set the
confidence interval to 95 percent in the Settings/Adjustment
screen. Then process the raw data. Then you may inverse between
points in as many combinations as you deem necessary and make note
of the semi-major axis error values. If none of them are larger
than 0.07 feet + (50PPM*distance), you have met the standards. It
is however more convienent to create a Reletive Error Points File
containing the points you wish to check and include the ALTA
tolerance report. This report takes into account the PPM and
directly tells you if the positional tolerance between the
selected points meets the ALTA standards.
Convert GPS File to ASCII
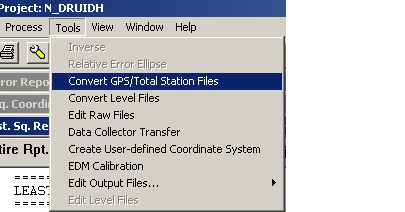
The purpose of this option is to
convert GPS vector files that are typically in the manufacturers'
binary or ASCII format into the Carlson ASCII file format. The
advantage of creating an ASCII file is that the ASCII file can be
edited using a standard text editor. Being able to edit the vector
file may be necessary in order to edit point numbers so that the
point numbers in the GPS file match the point numbers in the total
station file. The following dialog box is displayed after choosing
this option.

First choose the file format of the
GPS vector file to be converted. Next use the 'Select' button to
navigate to the vector file to be converted. If you are converting
a Thales file you have the option to remove the leading 0's from
Thales point numbers. Next, use the second 'Select' button to
select the name of the new ASCII GPS vector file to be created.
Choose the 'Convert' button to initiate the file conversion. Press
the 'Cancel' button when you have completed the conversions. The
file created will have an extension of .GPS. Following are the
different GPS formats that can be converted to ASCII.
Ashtech/Thales 'O' files:
Typically have .obn extensions and are binary files. Notice that
you have the option to remove the leading 0's from Thales point
numbers, by checking the "Remove leading 0's from Thales point
numbers" check box.
Carlson .RW5(containing GPS
vectors)
GeoLab IOB
LandXML (.XML):The landXML format is an industry standard
format. Currently SurvNet will only import LandXML survey point
records. The conversion will not import LandXML vectors.
Leica:The Leica vector file is an ASCII format typically
created with the Leica SKI software. This format is created by
Leica when baseline vectors are required for input into 3rd party
adjustment software such as SurvNet. The SKI ASCII Baseline Vector
format is an extension of the SKI ASCII Point Coordinate
format.
NGS G-File: National
Geodetic Survey format.
NGS G-File from OPUS
report:National Geodetic Survey format as used in the OPUS
report
Topcon (.TVF):The Topcon Vector File is in ASCII format and
typically has an extension of .TVF
Topcon (.XML):The Topcon XML file is an ASCII file. It
contains the GPS vectors in an XML format. This format is not
equivalent to LandXML format.
Trimble Data Exchange Format (.ASC):The Trimble TDEF format
is an ASCII file. It is typically output by Trimble's office
software as a means to output GPS vectors for use by 3rd party
software.
Trimble Data Collection (.dc):The Trimble .dc format is an
ASCII file. It is typically output by Trimble's data collector. It
contains a variety of measurements including GPS vectors. This
option only converts GPS vectors found in the .DC file.
Trimble LandXML,
(*.jxl):This is Trimble's Land XML format.
The Trimble Data Collection (.dc) and Trimble
LandXML (.jxl) formats allow you to bring in both GPS vectors
(creating a .GPS file) and Total Station data (creating a .RW5
file) at the same time.
Convert Level Files
The purpose of this option is to
convert differential level files into C&G/Carlson differential
level file format (TLV files). At present the only level file
formats that can be converted are the level files downloaded from
the Topcon and Leica digital levels.

However, the Level Editor has several IMPORT
options which expands the types of files you can convert:
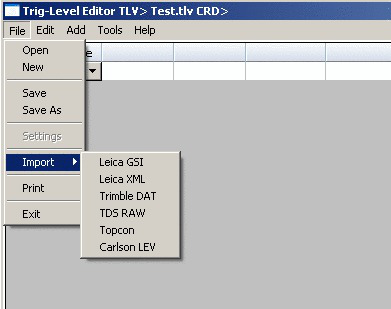
Toolbars
Many of the most
commonly used functions can be accessed using the toolbar.
Following is an explanation of the buttons found in the toolbar.

Create New Project- New project Icon.
Open an Existing Project- Open file Icon.
Save the Current Project- Disk Icon.
Print the Reports- Printer Icon.
Settings- Icon looks like a wrench. This takes you to the
SETTINGS->STANDARD ERRORS tab.
Data Collector Transfer
Program-This icon will run either the C&G Data
Collector Transfer/Conversion program or the Carlson SurvCom
program. The C&G program allows you to transfer data from
the data collector, or convert the data collector file to a .CGR
file format. It supports all major data collectors. The Carlson
program connects specifically to the Carlson SurvCE data collector.
Edit Raw Data-This icon can be used to start either the
.RW5 raw data editor or the .CGR raw data editor. If your project
has multiple raw data files, you will be shown a list and asked to
select the file you wish to edit. The appropriate editor will be
called depending on what type raw files are defined in the project
settings. If no raw file or project has been specified the default
raw editor as defined in the Settings->Global Settings menu
option will be executed. Any changes you make in the editor need to
be saved before returning to SurvNet for processing.
Process Network -Icon looks like a spider web. Pressing this
Icon will process and adjust the data and show the reports.
Inverse- Icon has a line with points on each end..
Relative Error Ellipses- Icon has a line with points on each
end and an ellipse in the middle.
Graphics-
Icon that looks like an eye. This icon is active once a project has
been opened.
Results from Network Processing
Report File:A report file consisting of the project name
with an .RPT extension is generated after successfully processing
the raw data. The report file will be shown in a text window so you
can analyze the data. You can pick the "Printer" icon if you want a
hard-copy. Following is an example of the results from a relatively
simple network adjustment using a local coordinate system.
Sample 2D/1D, Local Coordinate System Report
File
===============================
LEAST SQUARES ADJUSTMENT REPORT
===============================
Mon May 08 10:16:16 2006
2D Geodetic Model.
Input Raw Files:
C:\data\lsdata\cgstar\CGSTAR.CGR
Output File: C:\data\lsdata\cgstar\cgstar.RPT
Curvature, refraction correction: ON
Maximum iterations: 10 , Convergence Limit: 0.002000
Local Coordinate System, Scale Factor: 1.000000
Horizontal Units: US Feet
Confidence Interval: 95.00
Default Standard Errors:
Distance: Constant 0.010 ,PPM: 5.000
Horiz. Angle: Pointing 3.0" ,Reading: 3.0"
Vert. Angle: Pointing 3.0" ,Reading: 3.0"
Total Station: Centering 0.005 ,Height:
0.010
Target: Centering 0.005 ,Height: 0.010
Azimuth: 5"
Coordinate Control: N:0.010, E:0.010,
Z:0.030,
Horizontal Angle spread exceeds tolerance:
IP: 1,
BS: 5,
FS: 2
Low: 109-19'10.0" ,
High: 109-19'17.0" ,
Diff: 000-00'07.0"
Horizontal Angle spread exceeds tolerance:
IP: 2,
BS: 1,
FS: 6
Low: 190-32'02.0" ,
High: 190-32'10.0" ,
Diff: 000-00'08.0"
Horizontal Angle spread exceeds tolerance:
IP: 2,
BS: 1,
FS: 3
Low: 096-03'48.0" ,
High: 096-03'56.0" ,
Diff: 000-00'08.0"
Horizontal Angle spread exceeds tolerance:
IP: 3,
BS: 2,
FS: 4
Low: 124-03'50.0" ,
High: 124-03'56.0" ,
Diff: 000-00'06.0"
Horizontal Angle spread exceeds tolerance:
IP: 5,
BS: 4,
FS: 10
Low: 039-26'35.0" ,
High: 039-26'45.0" ,
Diff: 000-00'10.0"
Horizontal Angle spread exceeds tolerance:
IP: 10,
BS: 5,
FS: 11
Low: 241-56'23.0" ,
High: 241-56'35.0" ,
Diff: 000-00'12.0"
Horizontal Angle spread exceeds tolerance:
IP: 11,
BS: 10,
FS: 12
Low: 114-56'20.0" ,
High: 114-56'34.0" ,
Diff: 000-00'14.0"
Horizontal Angle spread exceeds tolerance:
IP: 12,
BS: 11,
FS: 3
Low: 140-39'18.0" ,
High: 140-39'31.0" ,
Diff: 000-00'13.0"
Horizontal Angle spread exceeds tolerance:
IP: 5,
BS: 4,
FS: 1
Low: 117-30'35.0" ,
High: 117-30'50.0" ,
Diff: 000-00'15.0"
Horizontal Distance from 2 to 3 exceeds tolerance:
Low: 324.15,
High: 324.20,
Diff: 0.04
Vertical Distance from 2 to 3 exceeds tolerance:
Low: 6.62,
High: 8.36,
Diff: 1.74
Vertical Distance from 3 to 4 exceeds tolerance:
Low: 11.46,
High: 11.51,
Diff: 0.05
Horizontal Distance from 12 to 3 exceeds tolerance:
Low: 144.64,
High: 144.66,
Diff: 0.02
HORIZONTAL ADJUSTMENT REPORT
============================
Unadjusted Observations
=======================
Control Coordinates:
1 Observed Points,
0 Fixed Points,
0 Approx. Points
Sta.
N:
E:
StErr N:
StErr E:
1
658428.26
2150182.70
0.01
0.01
Distances:
14 Observations
From Sta.
To Sta.
Dist.
StErr
1
5
290.45
0.01
1
2
292.21
0.01
2
6
52.39
0.01
2
3
324.19
0.01
3
4
275.60
0.01
3
20
134.66
0.01
20
21
116.07
0.01
21
22
50.12
0.01
4
5
309.65
0.01
5
10
129.99
0.01
10
11
126.01
0.01
10
15
10.00
0.01
11
12
129.43
0.01
12
3
144.65
0.01
Angles:
15 Observations
BS Sta.
Occ. Sta.
FS Sta.
Angle
StErr (Sec.)
5
1
2
109-19'13.5"
7.7
1
2
6
190-32'06.0"
26.2
1
2
3
096-03'52.0"
7.3
2
3
4
124-03'53.0"
7.8
2
3
20
185-23'56.0"
12.8
3
20
21
180-15'26.0"
17.6
20
21
22
183-26'45.0"
31.2
3
4
5
093-02'11.5"
7.5
4
5
10
039-26'40.0"
10.4
5
10
11
241-56'29.0"
15.6
5
10
15
056-23'10.0"
125.0
10
11
12
114-56'27.0"
15.5
11
12
3
140-39'24.5"
15.3
12
3
2
325-54'30.0"
9.5
4
5
1
117-30'42.5"
7.7
Azimuths:
1 Observations
Occ. Sta.
FS Sta.
Bearing
StErr (Sec.)
1
2
N 45-00'00.0"E
5.0
Adjusted Coordinates
====================
Adjusted Local Coordinates
Sta.
N:
E:
StErr N:
StErr E:
1
658428.26
2150182.70
0.02
0.02
2
658634.88
2150389.32
0.02
0.02
5
658554.12
2149920.92
0.03
0.02
3
658887.03
2150185.59
0.02
0.03
4
658863.61
2149910.99
0.03
0.03
20
658999.28
2150111.19
0.03
0.04
21
659096.31
2150047.49
0.04
0.05
10
658657.11
2150000.25
0.03
0.03
11
658636.21
2150124.52
0.03
0.03
12
658742.89
2150197.81
0.03
0.03
Adjusted Coordinates Error Ellipses, 95% CI
Sta.
Semi Major
Semi Minor
Max. Error Az.
Axis
Axis
1
0.05
0.05
S 29-26'39.4"E
2
0.07
0.07
N 45-00'00.0"E
5
0.08
0.07
N 10-58'28.2"E
3
0.10
0.07
N 84-37'31.0"E
4
0.11
0.07
N 51-23'12.0"E
20
0.13
0.10
N 84-24'17.5"E
21
0.17
0.12
N 72-01'17.5"E
10
0.09
0.07
N 43-35'54.5"E
11
0.09
0.08
N 54-43'51.1"E
12
0.08
0.08
N 79-48'07.2"E
Adjusted Observations
=====================
Adjusted Distances
From Sta.
To Sta.
Distance
Residual
StdRes.
StdDev
1
5
290.46
0.01
1.42
0.01
1
2
292.21
-0.00
0.40
0.01
2
3
324.17
-0.01
1.62
0.01
3
4
275.59
-0.01
1.11
0.01
3
20
134.66
-0.00
0.00
0.02
20
21
116.07
-0.00
0.00
0.02
4
5
309.65
0.01
0.64
0.01
5
10
130.00
0.01
0.97
0.01
10
11
126.01
0.00
0.16
0.01
11
12
129.44
0.01
0.98
0.02
12
3
144.66
0.01
0.94
0.02
Root Mean Square (RMS)
0.01
Adjusted Angles
BS Sta.
Occ. Sta.
FS Sta.
Angle
Residual
StdRes
StdDev(Sec.)
5
1
2
109-19'19.2"
5.7
0.7
9.9
1
2
3
096-03'43.4"
-8.6
1.2
9.2
2
3
4
124-03'48.1"
-4.9
0.6
10.1
2
3
20
185-23'56.0"
-0.0
0.0
21.5
3
20
21
180-15'26.0"
0.0
0.0
29.7
3
4
5
093-02'12.8"
1.3
0.2
9.3
4
5
10
039-26'37.1"
-2.9
0.3
14.4
5
10
11
241-56'27.5"
-1.5
0.1
21.2
10
11
12
114-56'39.8"
12.8
0.8
21.8
11
12
3
140-39'40.8"
16.3
1.1
20.3
12
3
2
325-54'33.8"
3.8
0.4
13.2
4
5
1
117-30'56.6"
14.1
1.8
9.9
Root Mean
Square (RMS)
8.1
Adjusted Azimuths
Occ. Sta.
FS Sta.
Bearing
Residual
StdRes
StdDev(Sec.)
1
2
N 45-00'00.0"
E
0.0
0.0
8.4
Root Mean Square (RMS)
0.0
Statistics
==========
Solution converged in 2 iterations
Degrees of freedom:6
Reference variance:2.84
Standard error unit Weight: +/-1.68
Failed the Chi-Square test at the 95.00
significance level
1.237 <= 17.023 <= 14.449
Sideshots
=========
From
To
Bearing
Dist.
N
E
StDev .
N
StDev . E
2
6
N 55-32'06.0"E
52.39
658664.53
2150432.52
0.02
0.02
21
22
N 29-50'09.6"W
50.12
659139.78
2150022.56
0.04
0.05
10
15
N 86-00'28.6"W
10.00
658657.80
2149990.27
0.03
0.03
LEAST SQUARES VERTICAL
ADJUSTMENT REPORT
Mon May 08 10:16:16 2006
2D Geodetic Model.
Input Raw Files:
C:\data\lsdata\cgstar\CGSTAR.CGR
Output File: C:\data\lsdata\cgstar\cgstar.RPT
Curvature, refraction correction: ON
FIXED VERTICAL
BENCHMARKS
Station
Elevation
1
569.8500
POINTS TO BE
ADJUSTED
Station
2,5,3,4,10,11,12
MEASUREMENT
SUMMARY
From
To
Elev. Diff.
(unadjusted)
StdErr
1
5
7.5040
0.0145
1
2
7.5659
0.0145
2
3
6.9843
0.0145
3
4
-11.4907
0.0146
4
5
4.3557
0.0145
5
10
2.2639
0.0143
10
11
1.0931
0.0143
11
12
0.3828
0.0143
12
3
3.3590
0.0144
STATISTICAL SUMMARY
Total Unknown Elevations:10
Total Elev. Routes:12
Total Fixed BM's:1
Total non-fixed BM's:0
Degrees of freedom:2
ADJUSTED ELEVATIONS
Station
Adjusted
Elev
Standard Dev.
1
569.8500
0.00000
2
577.4336
0.02465
5
577.3363
0.02465
3
584.4355
0.02915
4
572.9628
0.03070
10
579.6003
0.03341
11
580.6935
0.03641
12
581.0764
0.03519
ADJUSTED MEASUREMENT
SUMMARY
From
To
Elev. Diff.
Residuals
(adjusted)
1
5
7.4863
-0.0177
1
2
7.5836
0.0177
2
3
7.0019
0.0177
3
4
-11.4728
0.0179
4
5
4.3735
0.0178
5
10
2.2641
0.0001
10
11
1.0932
0.0001
11
12
0.3829
0.0001
12
3
3.3591
0.0001
Vertical Sideshots
Station
Elevation
20
571.77
21
581.25
22
580.14
15
579.60
Pre-Process TAB:
Project Settings
The first section of the report
displays the project settings at the time the project was
processed.
Tolerances
The second section of the report
displays warning and error messages generated during the
preprocessing of the raw data. The primary messages
displayed
will be warnings when multiple angles, horizontal
distances, and
vertical differences exceed the tolerance settings as set
in the
project settings. The low and high measurement and the
difference are displayed. It is prudent to pay attention to
any
messages generated in this section of the report.
Unadjusted Observations TAB:
The next four sections list the
reduced and averaged, but unadjusted measurements that
make up the network. Multiple measurements of the same
angle or
distance are averaged to a single measurement. The standard
error of multiple averaged measurements is less than the
standard error of a single measurement. When multiple
measurements are used, the standard error for the averaged
measurement will be computed using the average of the mean
formula.
The first of the four sections is a
list of the control coordinates used in the network
adjustment.
These coordinates could have been read from the .RW5 or
.CGR raw
data file, or from the supplemental coordinate file. Notice
that
the standard errors for the control points are
displayed.
The second of the four measurement
sections shows the distances and distance standard errors
used
in the adjustment. These distances are horizontal distances
computed from all slope distance and vertical angles for
that
distance, including all foresight and backsight distances.
The
standard error settings used to calculate the final
distance
standard error include the distance standard error, the PPM
standard error, the target centering standard error and the
instrument centering standard errors. The techniques and
formulas used to calculate the final distance standard
error are
found in section 6.12 of the textbook "Adjustment
Computations,
Statistics and Least Squares in Surveying and GIS", by Paul
Wolf
and Charles Ghilani.
The third of the four measurement
sections shows the angles and angle standard errors used in
the
adjustment. These angles are the averaged angle value for
all
the multiple angles collected. The standard error settings
used
to calculate the final angle standard error include the
pointing
standard error, the reading standard error, the target
centering
standard error and the instrument centering standard
errors. The
techniques and formulas used to calculate the final angle
standard error are found in section 6.2 of the textbook
"Adjustment Computations, Statistics and Least Squares in
Surveying and GIS", by Paul Wolf and Charles Ghilani.
The fourth of the four measurement
sections shows the azimuths and azimuth standard errors
used in
the adjustment. Azimuths can only be defined as a direction
record in the .RW5 or .CGR raw data file.
Adjusted Observations TAB:
The next three sections list the
adjusted horizontal distance, horizontal angle, and azimuth
measurements. In addition to the adjusted measurement the,
residual, the standard residual and the standard deviation
of
the adjusted measurement is displayed.
The residual is defined as the
difference between the unadjusted measurement and the
adjusted
measurement. The residual is one of the most useful and
intuitive measures displayed in the report. Large residuals
in
relation to the standards of the survey are indications of
problems with the data.
The standard residual is the a
priori standard error divided by the residual of a
measurement.
The a priori standard errors are the standard errors of the
measurements as displayed in the unadjusted measurement
section.
A standard residual of 1 indicates that the adjusted
measurement
is consistent with the adjustment being made to the
measurement.
One or a few measurements having high standard residuals,
in
relation to the rest of the standard residuals, may be an
indication of a blunder in the survey. When all standard
residuals are consistently large there is likely an
inconsistency in the a priori standard errors and the
adjustments being made to the measurements. In other words
the
standard errors defined for the project are too small, in
relation to the survey methods used.
The standard deviation of the
measurement means that there is a 68% probability that the
adjusted measurement is within plus or minus the standard
deviation of the measurement's true value.
Additionally,
the root mean square of each measurement type is displayed.
The
root mean square is defined as the square root of the
average of
the squares of a set of numbers. Loosely defined, it can be
described as an average residual for that measurement
type.
Statistics
The next section displays some
statistical measures of the adjustment including the number
of
iterations needed for the solution to converge, the degrees
of
freedom of the network, the reference variance, the
standard
error of unit weight, and the results of a Chi-square
test.
The degree of freedom is an
indication of how many redundant measurements are in the
survey.
Degree of freedom is defined as the number of measurements
in
excess of the number of measurements necessary to solve the
network.
The standard error of unit weight
relates to the overall adjustment and not an individual
measurement. A value of one indicates that the results of
the
adjustment are consistent with a priori standard errors.
The
reference variance is the standard error of unit weight
squared.
The chi-square test is a test of the
"goodness" of fit of the adjustment. It is not an absolute
test
of the accuracy of the survey. The a priori standard errors
which are defined in the project settings dialog box or
with the
SE record in the raw data (.RW5 or .CGR) file are used to
determine the weights of the measurements. These standard
errors
can also be looked at as an estimate of how accurately the
measurements were made. The chi-square test merely tests
whether
the results of the adjusted measurements are consistent
with the
a priori standard errors.
Notice that if you change the
project standard errors and then reprocess the survey the
results of the chi-square test change, even though the
final
adjusted coordinates may change very little.
Adjusted Coordinates TAB:
If the adjustment of the network
converges the next section displays a list of the final
adjusted
coordinates and the computed standard X, Y standard error.
An
interpretation of the meaning of the X, Y standard error,
is
that there is a 68% probability that the adjusted X, Y is
within
plus or minus the standard error of the X, Y of its true
value.
The next section displays the error
ellipses for the adjusted coordinates. The error ellipse is
a
truer representation of the error of the point than the X,
Y
standard error. The error ellipses are calculated to the
confidence interval as defined in the settings screen. In
this
report the error ellipse axis is larger than the X, Y
standard
errors since the error ellipses in this report are
calculated at
a 95% probability level as set in the Settings screens. The
maximum error axis direction is along the axis of the
semi-major
axis. The direction of the minimum error axis direction is
along
the semi-minor axis and is perpendicular to the semi-major
axis.
If a point is located from a variety of stations, you will
most
likely see that the error ellipse will approach a circle,
which
is the strongest geometric shape.
Sideshots TAB:
The next section displays the
computed sideshots of the network. Sideshots are filtered
out of
the network adjustment as part of the preprocessing process
if
the 'Enable Sideshots for Error Ellipses' toggle is OFF.
Least
squares adjustment requires a lot of computer resources.
Sideshots are filtered out to minimize the computer
resources
needed in a large network adjustment. The sideshots are
computed
from the final adjusted network points. The results of the
side
shot computations are the same whether they are reduced as
part
of the least squares adjustment or from the final adjusted
coordinates.
Elevation Report TAB:
The next part of the report displays
the results of the vertical adjustment. In the 2D/1D model
the
horizontal and the vertical adjustments are separate least
squares adjustment processes. As long as there are
redundant
vertical measurements the vertical component of the network
will
also be reduced and adjusted using least squares.
The first section displays the fixed
vertical benchmarks used in the vertical adjustment. These
points are fixed and will not be adjusted vertically. Next,
is
listed the points that will be adjusted as part of the
vertical
adjustment. The following section displays the measurements
used
in the adjustment. The measurements consist of the vertical
elevation difference between points in vertical adjustment.
The
lengths between these points are used to determine the
weights
in the vertical adjustment. Longer length lines are
weighted
less in the vertical adjustment than shorter length lines.
The next section shows Statistical
Information about the vertical adjustement. It lists the
total
number of unknown elevations, the number of routes
involved, the
number of fixed and non-fixed benchmarks and the degrees of
freedom..
The next section displays the
adjusted elevations and the computed standard deviations of
the
computed elevations. Following the adjusted elevation
section is
a section displaying the final adjusted elevation
difference
measurements and their residuals. Finally, the computed
side
shot elevations are displayed.
State Plane Reduction Report file:
When reducing to a state plane
coordinate system, there is additional information
displayed in
the report file.
First, notice the heading of the
report. The heading indicates that the project is being
reduced
into the
North Carolina
zone of the 1983 State Plane Coordinate System. The heading
shows that the elevation factor is computed based on a
project
elevation of 250 feet:
Sample 2D/1D, State Plane
Coordinate System Report File
===============================
LEAST SQUARES ADJUSTMENT REPORT
===============================
Tue Mar 21 17:37:27 2006
2D Geodetic Model.
Input Raw Files:
C:\data\lsdata\cgstar\CGSTAR.CGR
Output File: C:\data\lsdata\cgstar\cgstar.RPT
Curvature, refraction correction: ON
Maximum iterations: 10 , Convergence Limit: 0.002000
1983 State Plane Coordinates, zone:3200
North Carolina
Elevation factor computed from project elevation,250.000000.
Elevation Units: US Feet
Horizontal Units: US Feet
Confidence Interval: 95.00
Project Geoid Height:
0.00
Default Standard Errors:
Distance: Constant 0.010 ,PPM: 5.000
Horiz. Angle: Pointing 3.0" ,Reading: 3.0"
Vert. Angle: Pointing 3.0" ,Reading: 3.0"
Total Station: Centering 0.005 ,Height:
0.010
Target: Centering 0.005 ,Height: 0.010
Azimuth: 5"
Coordinate Control: N:0.010, E:0.010,
Z:0.030,
Horizontal Angle spread exceeds tolerance:
IP: 1,
BS: 5,
FS: 2
Low: 109-19'10.0" ,
High: 109-19'17.0" ,
Diff: 000-00'07.0"
Horizontal Angle spread exceeds tolerance:
IP: 2,
BS: 1,
FS: 6
Low: 190-32'02.0" ,
High: 190-32'10.0" ,
Diff: 000-00'08.0"
Horizontal Angle spread exceeds tolerance:
IP: 2,
BS: 1,
FS: 3
Low: 096-03'48.0" ,
High: 096-03'56.0" ,
Diff: 000-00'08.0"
Horizontal Angle spread exceeds tolerance:
IP: 3,
BS: 2,
FS: 4
Low: 124-03'50.0" ,
High: 124-03'56.0" ,
Diff: 000-00'06.0"
Horizontal Angle spread exceeds tolerance:
IP: 5,
BS: 4,
FS: 10
Low: 039-26'35.0" ,
High: 039-26'45.0" ,
Diff: 000-00'10.0"
Horizontal Angle spread exceeds tolerance:
IP: 10,
BS: 5,
FS: 11
Low: 241-56'23.0" ,
High: 241-56'35.0" ,
Diff: 000-00'12.0"
Horizontal Angle spread exceeds tolerance:
IP: 11,
BS: 10,
FS: 12
Low: 114-56'20.0" ,
High: 114-56'34.0" ,
Diff: 000-00'14.0"
Horizontal Angle spread exceeds tolerance:
IP: 12,
BS: 11,
FS: 3
Low: 140-39'18.0" ,
High: 140-39'31.0" ,
Diff: 000-00'13.0"
Horizontal Angle spread exceeds tolerance:
IP: 5,
BS: 4,
FS: 1
Low: 117-30'35.0" ,
High: 117-30'50.0" ,
Diff: 000-00'15.0"
Horizontal Distance from 2 to 3 exceeds tolerance:
Low: 324.15,
High: 324.20,
Diff: 0.04
Vertical Distance from 2 to 3 exceeds tolerance:
Low: 6.62,
High: 8.36,
Diff: 1.74
Vertical Distance from 3 to 4 exceeds tolerance:
Low: 11.46,
High: 11.51,
Diff: 0.05
Horizontal Distance from 12 to 3 exceeds tolerance:
Low: 144.64,
High: 144.66,
Diff: 0.02
HORIZONTAL ADJUSTMENT REPORT
============================
Unadjusted Observations
=======================
Control Coordinates:
1 Observed Points,
0 Fixed Points,
0 Approx. Points
Sta.
N:
E:
StErr N:
StErr E:
1
658428.26
2150182.70
0.01
0.01
The first distance listing in the
Unadjusted Observation section of the report
shows the unadjusted ground distances
Distances:
14 Observations
From Sta.
To Sta.
Ground Dist.
StErr
1
5
290.45
0.01
1
2
292.21
0.01
2
6
52.39
0.01
2
3
324.19
0.01
3
4
275.60
0.01
3
20
134.66
0.01
20
21
116.07
0.01
21
22
50.12
0.01
4
5
309.65
0.01
5
10
129.99
0.01
10
11
126.01
0.01
10
15
10.00
0.01
11
12
129.43
0.01
12
3
144.65
0.01
Angles:
15 Observations
BS Sta.
Occ. Sta.
FS Sta.
Angle
StErr (Sec.)
5
1
2
109-19'13.5"
7.7
1
2
6
190-32'06.0"
26.2
1
2
3
096-03'52.0"
7.3
2
3
4
124-03'53.0"
7.8
2
3
20
185-23'56.0"
12.8
3
20
21
180-15'26.0"
17.6
20
21
22
183-26'45.0"
31.2
3
4
5
093-02'11.5"
7.5
4
5
10
039-26'40.0"
10.4
5
10
11
241-56'29.0"
15.6
5
10
15
056-23'10.0"
125.0
10
11
12
114-56'27.0"
15.5
11
12
3
140-39'24.5"
15.3
12
3
2
325-54'30.0"
9.5
4
5
1
117-30'42.5"
7.7
Grid Azimuths:
1 Observations
Occ. Sta.
FS Sta.
Bearing
StErr (Sec.)
1
2
N 45-00'00.0"E
5.0
There is a new section displaying the reduced unadjusted grid
distances. The grid factor, the elevation factor, and the
combined factor used
to reduce the ground distance to a grid distance are included
in the listing:
Grid Distances:
14 Observations
From Sta.
To Sta.
Grid Dist.
Grid Factor
Z Factor
Combined Factor
1
5
290.41
0.99988685
0.99998804
0.99987490
1
2
292.18
0.99988686
0.99998804
0.99987491
2
6
52.38
0.99988689
0.99998804
0.99987494
2
3
324.15
0.99988692
0.99998804
0.99987497
3
4
275.57
0.99988695
0.99998804
0.99987500
3
20
134.65
0.99988697
0.99998804
0.99987501
20
21
116.06
0.99988700
0.99998804
0.99987504
21
22
50.11
0.99988701
0.99998804
0.99987506
4
5
309.61
0.99988691
0.99998804
0.99987495
5
10
129.97
0.99988688
0.99998804
0.99987493
10
11
125.99
0.99988689
0.99998804
0.99987494
10
15
10.00
0.99988690
0.99998804
0.99987494
11
12
129.41
0.99988690
0.99998804
0.99987495
12
3
144.63
0.99988694
0.99998804
0.99987498
The next section displays the reduced unadjusted horizontal
angles with the t-T correction applied.
The t-T correction is generally a small correction. For most
surveys of limited size the correction is
negligible. The t-T correction is displayed in seconds.
Grid Horizontal Angles:
15 Observations
BS Sta.
Occ. Sta.
FS Sta.
Angle
StErr (Sec.)
t-T
5
1
2
109-19'13.5"
7.7
0.0
1
2
6
190-32'06.0"
26.2
0.0
1
2
3
096-03'52.0"
7.3
0.0
2
3
4
124-03'53.0"
7.8
-0.0
2
3
20
185-23'56.0"
12.8
-0.0
3
20
21
180-15'26.0"
17.6
-0.0
20
21
22
183-26'45.0"
31.2
-0.0
3
4
5
093-02'11.5"
7.5
-0.0
4
5
10
039-26'40.0"
10.4
0.0
5
10
11
241-56'29.0"
15.6
0.0
5
10
15
056-23'10.0"
125.0
0.0
10
11
12
114-56'27.0"
15.5
0.0
11
12
3
140-39'24.5"
15.3
0.0
12
3
2
325-54'30.0"
9.5
0.0
4
5
1
117-30'42.5"
7.7
0.0
Adjusted Coordinates
====================
Adjusted Grid Coordinates
Sta.
N:
E:
StErr N:
StErr E:
1
658428.26
2150182.70
0.02
0.02
2
658634.86
2150389.30
0.02
0.02
5
658554.11
2149920.95
0.03
0.02
3
658886.98
2150185.59
0.02
0.03
4
658863.56
2149911.03
0.03
0.03
20
658999.20
2150111.20
0.03
0.04
21
659096.23
2150047.51
0.04
0.05
10
658657.08
2150000.27
0.03
0.03
11
658636.18
2150124.52
0.03
0.03
12
658742.85
2150197.81
0.03
0.03
In the Adjusted Coordinates section of the report there is a
new section
displaying the latitude and longitude of the final adjusted
points. Additionally
the convergence angle, the grid factor, the elevation factor,
and the combined
factor are displayed for each point:
Adjusted Geographic Coordinates
Sta.
Latitude
Longitude
Conv.
Ang.
Grid Factor Z Factor Combined Fact.
1
35-33'29.13143"N 78-29'42.16576"E
000-17'29.2" 0.99988684 0.99998804 0.99987488
2
35-33'31.16445"N 78-29'39.65237"E
000-17'30.7" 0.99988689 0.99998804 0.99987493
5
35-33'30.38930"N 78-29'45.32617"E
000-17'27.4" 0.99988687 0.99998804 0.99987491
3
35-33'33.66835"N 78-29'42.10255"E
000-17'29.2" 0.99988695 0.99998804 0.99987500
4
35-33'33.45055"N 78-29'45.42733"E
000-17'27.3" 0.99988695 0.99998804 0.99987499
20 35-33'34.78212"N 78-29'42.99610"E 000-17'28.7" 0.99988698
0.99998804 0.99987503
21 35-33'35.74495"N 78-29'43.76102"E 000-17'28.3" 0.99988701
0.99998804 0.99987505
10 35-33'31.40380"N 78-29'44.35979"E 000-17'27.9" 0.99988690
0.99998804 0.99987494
11 35-33'31.19087"N 78-29'42.85714"E 000-17'28.8" 0.99988689
0.99998804 0.99987493
12 35-33'32.24222"N 78-29'41.96349"E 000-17'29.3" 0.99988692
0.99998804 0.99987496
Adjusted Coordinates Error Ellipses, 95% CI
Sta.
Semi Major
Semi Minor
Max. Error
Az.
Axis
Axis
1
0.05
0.05
N 17-17'30.9"E
2
0.07
0.07
N 45-00'00.0"E
5
0.08
0.07
N 10-58'14.5"E
3
0.10
0.07
N 84-37'33.3"E
4
0.11
0.07
N 51-23'11.9"E
20
0.13
0.10
N 84-24'34.6"E
21
0.17
0.12
N 72-01'28.4"E
10
0.09
0.07
N 43-35'55.4"E
11
0.09
0.08
N 54-43'48.7"E
12
0.08
0.08
N 79-47'56.6"E
Adjusted Observations
=====================
Adjusted Distances
From Sta.
To Sta.
Distance
Residual
StdRes.
StdDev
1
5
290.43
0.01
1.42
0.01
1
2
292.17
-0.00
0.40
0.01
2
3
324.13
-0.01
1.62
0.01
3
4
275.56
-0.01
1.11
0.01
3
20
134.65
0.00
0.00
0.02
20
21
116.06
0.00
0.00
0.02
4
5
309.61
0.01
0.64
0.01
5
10
129.98
0.01
0.97
0.01
10
11
126.00
0.00
0.16
0.01
11
12
129.42
0.01
0.98
0.02
12
3
144.64
0.01
0.94
0.02
Root Mean Square (RMS)
0.01
Adjusted Angles
BS Sta.
Occ. Sta.
FS Sta.
Angle
Residual
StdRes
StdDev(Sec.)
5
1
2
109-19'19.2"
5.7
0.7
9.9
1
2
3
096-03'43.4"
-8.6
1.2
9.2
2
3
4
124-03'48.1"
-4.9
0.6
10.1
2
3
20
185-23'56.0"
-0.0
0.0
21.5
3
20
21
180-15'26.0"
-0.0
0.0
29.7
3
4
5
093-02'12.8"
1.2
0.2
9.3
4
5
10
039-26'37.2"
-2.8
0.3
14.4
5
10
11
241-56'27.5"
-1.5
0.1
21.2
10
11
12
114-56'39.8"
12.9
0.8
21.8
11
12
3
140-39'40.8"
16.3
1.1
20.3
12
3
2
325-54'33.8"
3.8
0.4
13.2
4
5
1
117-30'56.6"
14.1
1.8
9.9
Root Mean
Square (RMS)
8.1
Adjusted Azimuths
Occ. Sta.
FS Sta.
Bearing
Residual
StdRes
StdDev(Sec.)
1
2
N 45-00'00.0"E
-
0.0
0.0
8.4
Root Mean Square (RMS)
0.0
Statistics
==========
Solution converged in 2 iterations
Degrees of freedom:6
Reference variance:2.84
Standard error unit Weight: +/-1.69
Failed the Chi-Square test at the 95.00
significance level
1.237 <= 17.037 <= 14.449
Sideshots
=========
From
To
Bearing
Dist.
N
E
StDev .
N
StDev . E
2
6
N 55-32'06.0"E
52.38
658664.50
2150432.48
0.02
0.02
21
22
N 29-50'09.6"W
50.11
659139.69
2150022.58
0.04
0.05
10
15
N 86-00'28.6"W
10.00
658657.77
2149990.30
0.03
0.03
LEAST SQUARES VERTICAL
ADJUSTMENT REPORT
Tue Mar 21 17:37:27 2006
2D Geodetic Model.
Input Raw Files:
C:\data\lsdata\cgstar\CGSTAR.CGR
Output File: C:\data\lsdata\cgstar\cgstar.RPT
Curvature, refraction correction: ON
FIXED VERTICAL
BENCHMARKS
Station
Elevation
1
569.8500
POINTS TO BE
ADJUSTED
Station
2,5,3,4,10,11,12
MEASUREMENT
SUMMARY
From
To
Elev. Diff.
(unadjusted)
StdErr
1
5
7.5040
0.0145
1
2
7.5659
0.0145
2
3
6.9843
0.0145
3
4
-11.4907
0.0146
4
5
4.3557
0.0145
5
10
2.2639
0.0143
10
11
1.0931
0.0143
11
12
0.3828
0.0143
12
3
3.3590
0.0144
STATISTICAL SUMMARY
Total Unknown Elevations:10
Total Elev. Routes:12
Total Fixed BM's:1
Total non-fixed BM's:0
Degrees of freedom: 2
ADJUSTED ELEVATIONS
Station
Adjusted
Elev
Standard Dev.
1
569.8500
0.00000
2
577.4336
0.02465
5
577.3363
0.02465
3
584.4355
0.02915
4
572.9628
0.03070
10
579.6003
0.03341
11
580.6935
0.03641
12
581.0764
0.03519
ADJUSTED MEASUREMENT
SUMMARY
From
To
Elev. Diff.
Residuals
(adjusted)
1
5
7.4863
-0.0177
1
2
7.5836
0.0177
2
3
7.0019
0.0177
3
4
-11.4728
0.0179
4
5
4.3735
0.0178
5
10
2.2641
0.0001
10
11
1.0932
0.0001
11
12
0.3829
0.0001
12
3
3.3591
0.0001
Vertical Sideshots
Station
Elevation
20
571.77
21
581.25
22
580.14
15
579.60
Preprocess, compute unadjusted coordinates
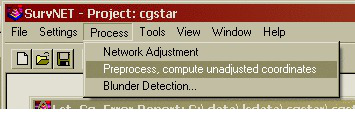
The 'Preprocess, compute unadjusted
coordinates' option allows the computation of unadjusted
coordinates. If there are redundant measurements in the raw
data, the first angle and distance found in the raw data is
used
to compute the coordinates. If a state plane grid system
has
been designated the measurements are reduced to grid prior
to
the computation of the unadjusted coordinates. If the point
is
located from two different points the initial computation
of the
point will be the value stored.
Blunder Detection
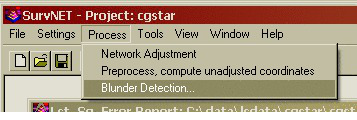
A variety of blunder
detection tools are available that gives the user additional
tools
in analyzing his survey data and detecting blunders. The
standard
least squares adjustment processing and its resulting
report can often be used to
determine blunders. No blunder detection method can be
guaranteed
to find all blunders. So much depends on the nature of the
network
geometry, the nature of the
measurements, and the intuition of the analyst.
Generally, the more redundancy there is in a network the
easier it
is to detect blunders.
There are three different
methods that can be used to track down blunders in a
network or
traverse.
Option 1) Preprocess the raw data:

The 'Preprocess the raw data' option
validates the raw data. It displays angle and distance
spreads
as well as checks the validity of the raw data. Traverse
closures are computed if specified. It also performs a
"K-Matrix" analysis. The "K-Matrix" analysis compares the
unadjusted, averaged measurements with the computed
preliminary
measurements (measurements calculated from the preliminary
computed coordinates). This method will catch blunders such
as
using the same point number twice for two different points.
The
report will be sent to the ERR file. The ERR file will
contain
the tolerance checks, closures and the K-Matrix analysis.
Following is an example of the report created using the
'Preprocess the raw data' option. Notice that the first
section
of the report shows the angle and distance spreads from the
multiple angle and distance measurements. The second part
of the
report shows the 'K-matrix analyses.
Additionally there is a 'Point
Proximity Report' section that reports pairs of different
points
that are in close proximity to each other which may
indicate
where the same point was collected multiple times using
different point numbers.
The 'Preprocess the raw data' option
is one of the simplest and effective tools in finding
blunders.
Time spent learning how this function works will be well
spent.
If the project is not converging due to an unknown blunder
in
the raw data this tool is one of the most effective tools
in
finding the blunder. Many blunders are due to point
numbering
errors during data collections, and the 'K-matrix' analysis
and
'Point Proximity' search are great tools for finding this
type
blunders.
=====================================
LEAST SQUARES ADJUSTMENT ERROR REPORT
=====================================
Tue Mar 21 16:04:32 2006
Input Raw Files:
C:\data\lsdata\cgstar\CGSTAR.CGR
Output File: C:\data\lsdata\cgstar\cgstar.RPT
Checking raw data syntax and angle & distance spreads.
Warning: Missing Vert. Angle. Assumption made as to whether it
is direct or reverse.
1
5.00
180.00050
4
Warning: Missing Vert. Angle. Assumption made as to whether it
is direct or reverse.
1
5.00
180.00070
5
Warning: Missing Vert. Angle. Assumption made as to whether it
is direct or reverse.
1
5.00
180.00100
10
Warning: Missing Vert. Angle. Assumption made as to whether it
is direct or reverse.
1
5.00
180.00020
11
Warning: Missing Vert. Angle. Assumption made as to whether it
is direct or reverse.
1
5.00
325.54320
2
H&T
Warning: Missing Vert. Angle. Assumption made as to whether it
is direct or reverse.
1
5.01
145.54300
2
H&T
Warning: Missing Vert. Angle. Assumption made as to whether it
is direct or reverse.
1
5.01
180.00020
12
Horizontal Angle spread exceeds tolerance:
IP: 1,
BS: 5,
FS: 2
Low: 109-19'10.0" ,
High: 109-19'17.0" ,
Diff: 000-00'07.0"
Horizontal Angle spread exceeds tolerance:
IP: 2,
BS: 1,
FS: 6
Low: 190-32'02.0" ,
High: 190-32'10.0" ,
Diff: 000-00'08.0"
Horizontal Angle spread exceeds tolerance:
IP: 2,
BS: 1,
FS: 3
Low: 096-03'48.0" ,
High: 096-03'56.0" ,
Diff: 000-00'08.0"
Horizontal Angle spread exceeds tolerance:
IP: 3,
BS: 2,
FS: 4
Low: 124-03'50.0" ,
High: 124-03'56.0" ,
Diff: 000-00'06.0"
Horizontal Angle spread exceeds tolerance:
IP: 5,
BS: 4,
FS: 10
Low: 039-26'35.0" ,
High: 039-26'45.0" ,
Diff: 000-00'10.0"
Horizontal Angle spread exceeds tolerance:
IP: 10,
BS: 5,
FS: 11
Low: 241-56'23.0" ,
High: 241-56'35.0" ,
Diff: 000-00'12.0"
Horizontal Angle spread exceeds tolerance:
IP: 11,
BS: 10,
FS: 12
Low: 114-56'20.0" ,
High: 114-56'34.0" ,
Diff: 000-00'14.0"
Horizontal Angle spread exceeds tolerance:
IP: 12,
BS: 11,
FS: 3
Low: 140-39'18.0" ,
High: 140-39'31.0" ,
Diff: 000-00'13.0"
Horizontal Angle spread exceeds tolerance:
IP: 5,
BS: 4,
FS: 1
Low: 117-30'35.0" ,
High: 117-30'50.0" ,
Diff: 000-00'15.0"
Horizontal Distance from 2 to 3 exceeds tolerance:
Low: 324.15,
High: 324.20,
Diff: 0.04
Vertical Distance from 2 to 3 exceeds tolerance:
Low: 6.62,
High: 8.36,
Diff: 1.74
Vertical Distance from 3 to 4 exceeds tolerance:
Low: 11.46,
High: 11.51,
Diff: 0.05
Horizontal Distance from 12 to 3 exceeds tolerance:
Low: 144.64,
High: 144.66,
Diff: 0.02
K-Matrix Analysis.
Distance: From pt.: 4
To pt.: 5
Measured distance:
309.61
Initial computed distance:
309.65
Difference:
-0.04
Distance: From pt.: 12
To pt.: 3
Measured distance:
144.63
Initial computed distance:
144.66
Difference:
-0.03
Distance: From pt.: 5
To pt.: 6
Measured distance:
348.51
Initial computed distance:
523.29
Difference:
-174.79
Angle: IP: 4
BS: 3
FS: 5
Measured angle:
093-02'11.5"
Initial computed angle:
093-01'45.1"
Difference:
000-00'26.4"
Angle: IP: 12
BS: 11
FS: 3
Measured angle:
140-39'24.5"
Initial computed angle:
140-40'32.6"
Difference: -000-01'08.1"
Angle: IP: 5
BS: 4
FS: 1
Measured angle:
117-30'42.5"
Initial computed angle:
117-31'16.4"
Difference: -000-00'33.9"
Angle: IP: 5
BS: 4
FS: 6
Measured angle:
145-30'34.0"
Initial computed angle:
079-39'46.4"
Difference:
065-50'47.6"
Point Proximity Report:
Points
3
and 30 are within
0.05 of each other.
The problem with the above project
was that point 6 was accidentally used twice for two
separate
side shots. Because of the point numbering problem the
project
would not converge, using the regular least squares
processing.
The 'Preprocess the raw data.' option was then used. Notice
in
the K-matrix section the distance from 5 to 6 shows a
difference
of 174.79' and the angle 4-5-6 shows a difference of
065-50'47.6". Then notice that the other listed differences
are
in the range of .02' for the distances and less than a
minute
for the angles. This report is clearly pointing out a
problem to
point 6.
Note the point proximity report
section. During data collection point number 30 was used as
the
point number when the point was previously collected as
point 3.
In the first section of the report notice that there are
several
warnings concerning whether a horizontal angle reading was
collected in direct or reverse reading. The preprocessing
software uses the vertical angle reading to determine the
angle
face of the horizontal angle reading. If the vertical angle
is
missing the program makes its best guess as to whether the
angle
was collected in direct or reverse face. Since all
horizontal
angle spreads in the report are reasonable, the
preprocessing
software must have made the correct determination.
Option 2) Float one observation:

This option is useful in finding a
single blunder, either an angle or distance, within a
network or
traverse. If there is more than a single blunder in the
network
then it is less likely that this method will be able to
isolate
the blunders. If the standard least squares processing
results
in a network that will not converge then this blunder
detection
method will not work. Use the 'Preprocess the raw data'
blunder
detection method if the solution is not converging. Also
this
method will only work on small and moderately sized
networks.
This method performs a least squares adjustment once for
every
non-trivial measurement in the network. So for large
networks
this method may take so long to process that it is not
feasible
to use this method.
With this method an adjustment is computed for each
non-trivial
individual angle and distance measurement. Consecutively, a
single angle or distance is allowed to float during each
adjustment. The selected angle or distance does not
"constrain"
the adjustment in any way. If there is a single bad angle
or
distance, one of the adjustment possibilities will place
most of
the error in the "float" measurement, and the other
measurements
should have small residuals. The potentially bad angle or
distance is flagged with a double asterisk (**). Since an
adjustment is computed for each measurement this method my
take
a long time when analyzing large data files.
The adjustments with the lowest reference variances are
selected
as the most likely adjustments that have isolated the
blunder.
You have the choice to view the best adjustment, or the top
adjustments with a maximum of ten. In the above example we
asked
to see the top 5 choices for potential blunders. The
results are
shown in the ERR file. Following is a section of the report
generated where an angular blunder was introduced into a
small
traverse. Notice the '**' characters beside the angle
measurements. In this report the two most likely
adjustments
were displayed. The blunder was introduced to angle
101-2-3.
Angle 101-2-3 was chosen as the 2nd most likely source of
the
blunder, showing that these blunder detection methods
though not
perfect, can be a useful tool in the analysis of survey
measurements. Notice how much higher the standard residuals
are
on the suspected blunders than the standard residuals of
the
other measurements.
Adjusted Observations
=====================
Adjusted Distances
From Sta.
To Sta.
Distance
Residual
StdRes.
StdDev
101
2
68.780
-0.006
0.608
0.008
2
3
22.592
-0.006
0.573
0.008
3
4
47.694
-0.002
0.213
0.008
4
5
44.954
-0.001
0.069
0.008
5
6
62.604
0.005
0.472
0.009
6
7
35.512
0.006
0.539
0.008
7
101
61.704
0.003
0.314
0.009
Root Mean Square (RMS)
0.005
Adjusted Angles
BS Sta. Occ. Sta.
FS Sta.
Angle
Residual
StdRes
StdDev(Sec.)
7
101
2
048-05'06"
-5
0
21
101
2
3
172-14'33"
-2
0
27
2
3
4
129-27'44"
-222
*
7
56
**
3
4
5
166-09'59"
11
0
25
4
5
6
043-12'26"
22
1
21
5
6
7
192-11'52"
12
0
25
6
7
101
148-38'19"
8
0
25
Root Mean
Square (RMS)
85
Adjusted Azimuths
Occ. Sta.
FS Sta.
Bearing
Residual
StdRes
StdDev(Sec.)
101
7
N 00-00'00"
E
0
0
4
Root Mean Square (RMS)
0
Statistics
==========
Solution converged in 2 iterations
Degrees of freedom:3
Reference variance:0.78
Standard error unit Weight: +/-0.88
Passed the Chi-Square test at the 95.00
significance level
0.216 <= 2.347 <= 9.348
Adjusted Observations
=====================
Adjusted Distances
From Sta.
To Sta.
Distance
Residual
StdRes.
StdDev
101
2
68.781
-0.005
0.473
0.009
2
3
22.592
-0.005
0.512
0.009
3
4
47.690
-0.006
0.586
0.009
4
5
44.950
-0.005
0.523
0.009
5
6
62.605
0.006
0.607
0.009
6
7
35.512
0.006
0.560
0.009
7
101
61.708
0.006
0.614
0.009
Root Mean Square (RMS)
0.006
Adjusted Angles
BS Sta.
Occ. Sta.
FS Sta.
Angle
Residual
StdRes
StdDev(Sec.)
7
101
2
048-05'22"
11
0
24
101
2
3
172-11'03"
-213
*
7
58
**
2
3
4
129-31'23"
-3
0
29
3
4
5
166-09'48"
1
0
26
4
5
6
043-12'11"
6
0
21
5
6
7
192-11'50"
10
0
27
6
7
101
148-38'24"
13
0
27
Root Mean
Square (RMS)
81
Adjusted Azimuths
Occ. Sta.
FS Sta.
Bearing
Residual
StdRes
StdDev(Sec.)
101
7
N-00-00'00"E
-0
0
5
Root Mean Square (RMS)
0
Statistics
==========
Solution converged in 2 iterations
Degrees of freedom:3
Reference variance:0.89
Standard error unit Weight: +/-0.94
Passed the Chi-Square test at the 95.00
significance level
0.216 <= 2.675 <= 9.348
The blunder is most likely in the
measurement containing the largest residual and standard
residual. The observation marked with ** is the observation
that
floated. It is also most likely the measurement containing
the
blunder.
Option 3) Re-weight by residuals & std err:

This method is capable of detecting
multiple blunders but one is more likely to find the
blunders if
there is a high degree of redundancy (network of
interconnected
traverses). The higher the degree of freedom the more
likely
this method will find the blunders. This method will not
work if
the standard least squares processing will not converge.
Use the
'Preprocess the raw data' blunder detection method if the
network is not converging.
First, select the number of
adjustments or passes you wish to make. Each time an
adjustment
is completed, the measurements will be re-weighted based on
the
residuals and standard errors. Hopefully, after three or
four
passes, the blunders will become obvious. The results are
shown
in the ERR file, look for the measurements with the highest
standard residuals. These measurements are more likely to
contain blunders.
The theory behind this method is
that after processing, the measurements with blunders are
more
likely to have higher residuals and computed standard
errors.
So, in the next pass the measurements are reweighted based
on
the computed residuals, with less weight being assigned to
the
measurements with high residuals. After several passes it
is
likely that the measurements with the blunders have been
reweighed such that they have little effect on the network.
As a rule of thumb three or four
passes are usually sufficient. Following is a section of
the
report showing the results of the 'Reweight by residuals
&
std. err.'. This report was generated using the same data
used
in the earlier example. Notice that it has flagged the same
two
angle measurements.
The 'Reweight by residuals & std. err.' method performs a
new adjustment for each pass. So, this method will take
longer
than the standard least squares adjustment, but does not
take
near as long to complete processing as the 'Float one
Observation' method for larger networks.
Adjusted Observations
=====================
Adjusted Distances
From Sta.
To Sta.
Distance
Residual
StdRes.
StdDev
101
2
68.778
-0.009
0.827
0.014
2
3
22.588
-0.010
0.942
0.015
3
4
47.694
-0.002
0.208
0.009
4
5
44.954
-0.001
0.077
0.006
5
6
62.608
0.010
0.919
0.016
6
7
35.517
0.011
1.040
0.016
7
101
61.705
0.004
0.398
0.011
Root Mean Square (RMS)
0.008
Adjusted Angles
BS Sta.
Occ. Sta.
FS Sta.
Angle
Residual
StdRes
StdDev(Sec.)
7
101
2
048-05'07"
-4
0
21
101
2
3
172-13'19"
-77
*
2
65
2
3
4
129-29'56"
-91
*
3
64
3
4
5
166-09'44"
-3
0
24
4
5
6
043-12'05"
0
0
9
5
6
7
192-11'40"
-0
0
19
6
7
101
148-38'10"
-1
0
20
Root Mean
Square (RMS)
45
Adjusted Azimuths
Occ. Sta.
FS Sta.
Bearing
Residual
StdRes
StdDev(Sec.)
101
7
N 00-00'00"E
0
0
2
Root Mean Square (RMS)
0
Statistics
==========
Solution converged in 1 iterations
Degrees of freedom:3
Reference variance:1.77
Standard error unit Weight: +/-1.33
Passed the Chi-Square test at the 95.00
significance level
0.216 <= 5.322 <= 9.348
The blunder is most likely in the measurement containing the
largest residual and standard residual.
Graphics
SurvNet provides a window that
graphically displays the survey network. Additionally the
user
is able to display error ellipses, and GPS vectors. The
user has
much control over how the network is displayed. The graphic
tool
is a useful tool in debugging networks since the raw data
can be
displayed prior to adjustment. If there are problems with
the
raw data the graphics often reflect the problem. The actual
graphics cannot be output or saved. The graphics can be
shown
independent of whether the project has been processed.
The following snapshot shows a view
of the graphic window. The graphic window can be accessed
using
the eye icon on the main tool bar. A project must be opened
before the graphic window can be displayed. The graphics
window
will only display error ellipses after the project has been
processed.
The tool bar in the graphics window
contains buttons that allow the user to pan, zoom in, zoom
out,
zoom extents, and zoom to a window. Additionally there is a
button that allows the user to navigate to points in the
.CGR
raw data editor. Also, there are buttons that will refresh
the
graphic, and change the graphic settings.
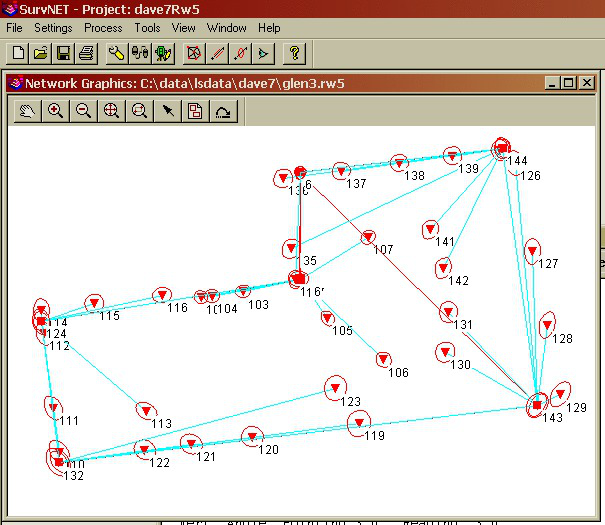
Pan:
 Use this button
to pan the graphics.
Use this button
to pan the graphics.
Zoom in:
 Use this button
to zoom
in on the graphics.
Use this button
to zoom
in on the graphics.
Zoom out:
 Use this button
to zoom out on
the graphics.
Use this button
to zoom out on
the graphics.
Zoom extent:
 Use this button
to zoom to the
extents of the graphics
Use this button
to zoom to the
extents of the graphics
Zoom to window:
 Use this button to zoom to the extents of a
user picked window.
Use this button to zoom to the extents of a
user picked window.
Pick Point.
 This button allows
the user to navigate within the .CGR raw editor from the
graphics window. Currently this button serves no purpose
when
working with .RW5 data..
This button allows
the user to navigate within the .CGR raw editor from the
graphics window. Currently this button serves no purpose
when
working with .RW5 data..
Settings:
 This buttons is used to
change the graphic display settings.
This buttons is used to
change the graphic display settings.
Refresh:
 This button
will refresh
the graphic view. Graphics are generated from the saved raw
data
file. If you make changes to the raw file in the raw editor
you
must save the file before the changes will be reflected in
the
refreshed graphic screen.
This button
will refresh
the graphic view. Graphics are generated from the saved raw
data
file. If you make changes to the raw file in the raw editor
you
must save the file before the changes will be reflected in
the
refreshed graphic screen.
Following is a description of the
options in the graphics setting dialog box, which is
accessed
using the
tool
bar button.
Points Options
These settings determine how the
different type control points are displayed in the graphics
window. Different graphic settings can be applied to
standard
control points, fixed control points and floating control
points. The symbol node display can be controlled as to
symbol
type, symbol color, symbol size. The control point name can
be
displayed and its size set from this setting dialog
box.
The graphic pick radius defines a
search radius. This radius is used when navigating the .CGR
editor using the graphic window. You can pick a point
graphically and the cursor in the editor will go to the
next
field containing that point number. The radius is defined
in
terms of the distance units of the raw data file.
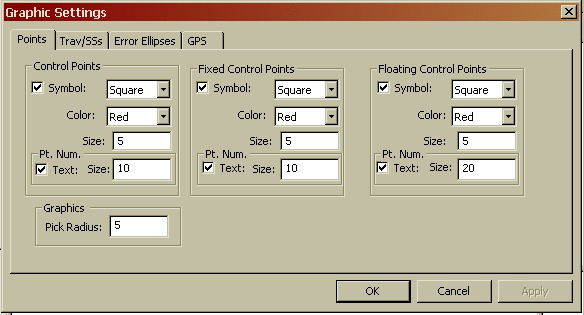
Trav/SS's Options
These settings determine how the
network line work will be displayed for total station raw
data.
There are settings for traverse data, side shot data, and
azimuth control. The program considers any point that has
only a
single angle and distance to it a side shot. The user can
control the color of the traverse lines. The symbol node
display
can be controlled as to symbol type, symbol color, symbol
size.
The point name can be displayed and its size set from this
setting dialog box.
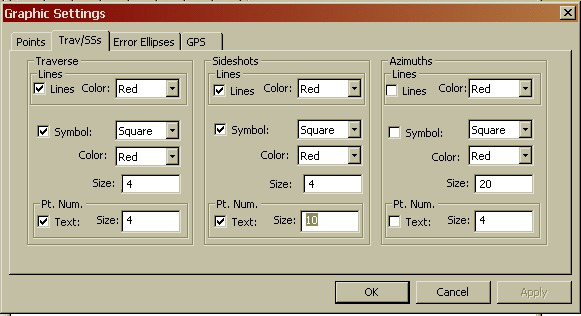
Error Ellipses Options
These settings determine how the
error ellipses will be displayed in the graphic window.
Error
ellipses will only be displayed if there is a successful
least
squares adjustment. The display of the error ellipses is
relative. The program automatically determines a default
relative error ellipse size. The user can modify the visual
size
of the error ellipses using the track bar in the following
dialog box. The user can also control the color of the
error
ellipse from the following dialog box.
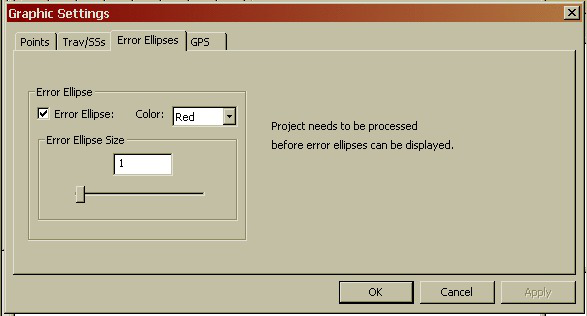
GPS Options
The settings in the following dialog
box determine how GPS vectors will be displayed in the
graphic
window. The user can control the color of the GPS vector
lines.
The symbol node display can be controlled as to symbol
type,
symbol color, symbol size. The GPS point names can be
displayed
and their size set from this setting dialog box.
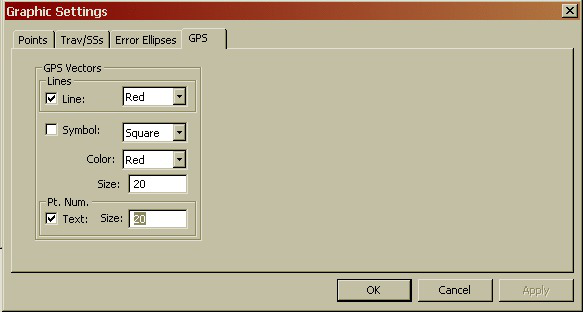
Traverse Closures
Some statutes and jurisdictions
still require the computation of traditional traverse
closures.
SurvNet gives the surveyor the ability to compute the
closures
of multiple traverses within a project as part of the
preprocessing of the project raw data. Closures for single
or
multiple traverses can be computed for a single project.
Additionally, GPS closures can be computed for GPS loops.
To
compute closures you must first create a "Closure" file
(.CLS).
Closure files define the type of traverse loops that are to
be
computed and the point numbers that make up the traverse.
There are two options in the FILE
menu that are used to create and edit the closure, .cls,
files:
Open Traverse Closure File
New Traverse Closure File
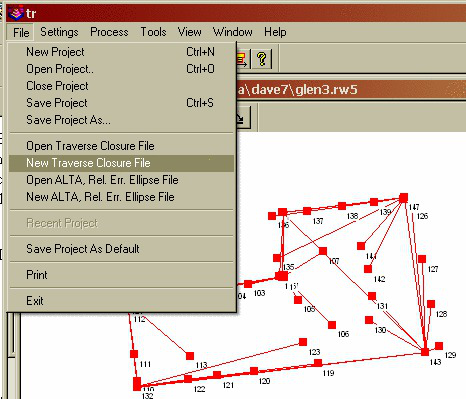
After choosing the 'New Traverse
Closure File' you will be prompted for a new file name.
After
choosing a file name the following dialog box is
displayed.
First enter the point sequence which
defines the traverse in the bottom left edit box. Check the
bottom check boxes to set whether vertical closure and
angle
closures need to be computed. Then choose what type
traverse is
being entered. When the bottom fields are correct press the
'Add' button and the traverse will be entered into the
upper
list box.
If you need to edit one of the
traverses in the top list box mouse click the traverse to
be
edited. The fields will be entered in the lower edit
fields.
Make the appropriate edits, then click the 'Change' button
to
save the changes to the upper list box.
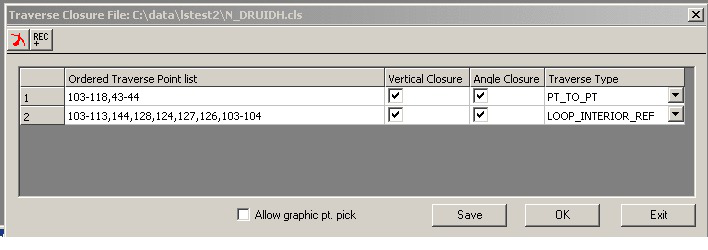
Enter the points that define the traverse. Points can be
entered in the form:
1,23,30-35,45,23,1
A comma separates the point numbers. You can select a
range
(30-35) when the points are sequential.
You must start
with the first backsight point number and end with the
last
foresight point number. For example, if you have a
simple loop traverse with angle closure using points 1,
2, 3
and 4, it will be entered as "4,1,2,3,4,1" where 1 is the
first occupied point and 4 is the initial backsight.
You can turn the "Angle Closure" ON or OFF. If the angle
closure is ON, you will be shown the total angular error
and
error per angle point. If the final closing angle was not
collected you can turn "Angle Closure" OFF and only the
linear
closure will be computed.
You can turn the "Vertical Closure" ON or OFF. If the
vertical
closure is ON, you will be shown the total vertical
distance
closure.
In order to calculate the traverse closure, you must
select
the TRAVERSE TYPE. It can be:
Pt. to Pt. Trav. - A point to point traverse is a
traverse that starts at a set of known coordinates and
ends at
another known coordinate. This option assumes you start
from
two control points and tie into two control points if an
angle
closure is desired and one control point if only a linear
closure is desired. The first backsight distance and last
foresight distance are not used in computing the linear
closure. Following is an example.
100,101,2-5
In the above pt. to pt. list Pt 100 is the starting backsight
point, Pt. 101 is the starting instrument point. Pt. 4 is
the
ending instrument point and the foresight to the angle
closure
point is point 5. If a closing angle was not collected
the
list would look as follows '100,101,2-4'.
Loop Trav., Int. Az. Ref. - A closed loop traverse
that begins by backsighting the last interior point on
the traverse. Following is an example.

7,101,2-7,101
In the above example closed loop with angle balance list,
point 7 is the backsight point and point 101 is the first
occupied point. If the closing angle 6-7-101 was
not collected the list would be entered as follows '
7,101,2-7'
Loop Trav., Ext. Az. Ref. - A closed loop traverse that
begins by backsighting an exterior point (point not on
the
traverse).

100,101,2-7,101,100
In the above example loop with exterior reference and angle
balance list, point 100 is the backsight point and point
101
is the first occupied point. If the closing angle
7-101-101 was not collected the list would be entered as
follows ' 100,101,2-7,101'
GPS
Loop Closure: - GPS loop
closures can be computed using this option.

A,E,F,A
In the above example GPS loop, closure will be computed
from the
GPS loop going from A-E-F-A.
GPS
Point to Point
Closure: - GPS Point to Point closures can be
computed
using this option.
A,E,D,B
In the above example the closure will be computed from the
GPS
traverse going from A-E-D-B. The starting and ending points
MUST
be control points.
After the closure, .CLS, file has
been created the preprocessing project settings need to be
updated to include the closure file in the project.
Following is
a view of the settings screen that defines a closure file
to be
used in preprocessing. Notice that the check box 'Compute
Traverse Closure' is checked and a closure file has been
entered
in the edit box field. Notice that the 'Edit/Create' button
can
be used to edit an existing closure file or create a new
closure
file.

When the data
is processed, the closure reports will appear in the RPT
and ERR
files. You will notice that two closures are shown, one
with no
angle balance and one with angle balance.
Following is
an example of a closed loop traverse report:
Traverse
Closures
=================
Traverse points:
103-118,43-44
Traverse starting and ending on different points;
Compute angle closure.
Compute vertical closure.
BS
IP
FS
Angle FS
H. Dist. FS V. Dist.
103
104
105
173-07'48.5"
310.4921 -7.7483
104
105
106
167-48'21.5"
253.4875 5.6291
105
106
107
200-52'46.0"
381.4923 8.4877
106
107
108
149-09'05.5" 410.5476
-16.6830
107
108
109
080-42'36.5"
245.5731 9.4221
108
109
110
174-21'17.5"
175.3848 -5.6971
109
110
111
201-42'21.5" 367.0019
-11.8161
110
111
112
171-52'54.5"
237.7809 7.5346
111
112
113
192-32'53.5"
368.8402 -7.0329
112
113
114
171-30'59.0" 338.0028
-19.1945
113
114
115
184-54'03.5"
344.5010 16.3157
114
115
116
149-20'19.5"
353.8460 7.5562
115
116
117
202-19'01.5"
390.1123 -9.9180
116
117
118
112-36'32.0"
293.9935 2.0060
117
118
43
146-06'36.5"
411.3680 -7.7112
118
43
44
270-04'01.5"
Closing
Az:
S 47-39'47.8"W
Computed Closing Az: S 47-39'51.3"W
Total angular error: 000-00'03.5"
Angular error per point: 000-00'00.2"
Correct Ending Coordinates, North: 1400952.0140 East:
2241884.7010
Ending Coordinates, North: 1400951.7936 East: 2241884.8160
Error, N: -0.2204 E: 0.1150 Total: 0.2486 Brg: N
27-33'06.7"W
Distance Traversed: 4882.4241 Closure: 1: 19643
Correct Ending Elevation: 948.1710
Ending
Elevation:
948.1203
Elevation
Error:
-0.0507
Closure After Angle Adjustment
103
104
105
173-07'48.3"
310.4921 -7.7483
104
105
106
167-48'21.3"
253.4875 5.6291
105
106
107
200-52'45.8"
381.4923 8.4877
106
107
108
149-09'05.3" 410.5476
-16.6830
107
108
109
080-42'36.3"
245.5731 9.4221
108
109
110
174-21'17.3"
175.3848 -5.6971
109
110
111
201-42'21.3" 367.0019
-11.8161
110
111
112
171-52'54.3"
237.7809 7.5346
111
112
113
192-32'53.3"
368.8402 -7.0329
112
113
114
171-30'58.8" 338.0028
-19.1945
113
114
115
184-54'03.3"
344.5010 16.3157
114
115
116
149-20'19.3"
353.8460 7.5562
115
116
117
202-19'01.3"
390.1123 -9.9180
116
117
118
112-36'31.8"
293.9935 2.0060
117
118
43
146-06'36.3"
411.3680 -7.7112
118
43
44
270-04'01.3"
Closing
Az:
S 47-39'47.8"W
Computed Closing Az: S 47-39'47.8"W
Total angular error: 000-00'00.0"
Angular error per point: 000-00'00.0"
Correct Ending Coordinates, North: 1400952.0140 East:
2241884.7010
Ending Coordinates, North: 1400951.7739 East: 2241884.8363
Error, N: -0.2401 E: 0.1353 Total: 0.2756 Brg: N
29-24'26.1"W
Distance Traversed: 4882.4241 Closure: 1: 17715
Following is an example of a GPS
loop closure report:
Traverse Closures
=================
GPS Loop Points:
A,E,F,A
GPS Loop Closure;
Misclosure, X:
-0.0323
Y:
-0.0162
Z:
-0.0105
Closure error:
0.0376
Perimeter: 20229.3858
Precision: 1:537594
GPS Loop Points:
C,F,D,B,C
GPS Loop Closure;
Misclosure, X:
-0.0121
Y:
-0.0101
Z:
0.0002
Closure error:
0.0158
Perimeter: 41332.9807
Precision: 1:2622216
GPS Loop Points:
F,D,B,F
GPS Loop Closure;
Misclosure, X:
-0.0022
Y:
-0.0044
Z:
0.0097
Closure error:
0.0109
Perimeter: 30814.5047
Precision: 1:2833226
Creating ALTA Tolerance Reports
SurvNet provides the ability to generate reports that give
the surveyor the information needed to determine if his
survey
is within ALTA positional tolerances. It is required that
the
user define which points are to be included in the ALTA
testing. The points to be included for ALTA testing are
defined in an .Alt file.
There are two options in the FILE menu that are used to
create
and edit the ALTA, .alt, files:
Open ALTA, Rel. Err. Ellipse File
New ALTA, Rel. Err. Ellipse File

After choosing the ALTA file to be
created or edited the following dialog box is
displayed.
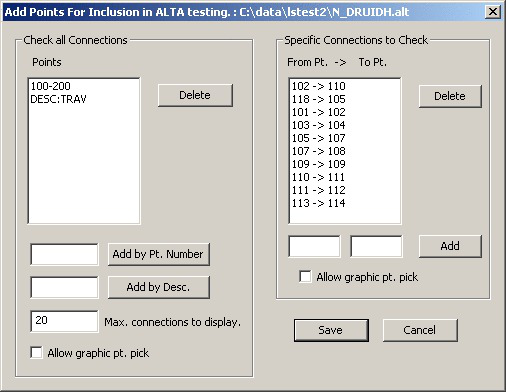
The above dialog box allows the user
to define the points to be included in the ALTA report
processing. There are two sections in the .RPT file created
through the ALTA reporting. The following report shows the
sections of the ALTA report generated by the data in the
dialog
box. The first section of the report displays only the
relative
error ellipses between points. The point sequences used in
this
section come from the list on the right hand side of the
above
dialog box. The second section of the report performs an
ALTA
tolerance test and displays only those connections that
fall
outside of the ALTA tolerances (as set in the ADJUSTMENT
tab of
the SETTINGS dialog box). The program first checks the
specific
point sequences defined by the list on the right side of
the
dialog box. The program then checks all the connections
between
all the points listed on the left hand side of the dialog
box.
There can be many connections to check if the point list on
the
left hand side of the dialog box has a lot of points. The
user
can limit the number of sequences to be displayed that fail
the
ALTA test by entering a number in the "Max. Connections to
display" field.
Notice that you can enter points based on descriptions in
the
left hand list box. If you wished to check connections
between
all points with TP, EIP, MON descriptions, enter the
descriptions in the edit field and press the 'Add' button.
If
TP, EIP, and MON represented traverse points, existing iron
pipes and monuments then ALTA testing would be performed on
those point types.
After you have created the .ALT
point file you need to set a few project settings. These
settings define the ALTA tolerances, specify the .ALT file
to be
used, and define the type of reporting to be generated. The
'Adjustment' tab sheet within the project 'Settings', has a
relative error ellipse section where the ALTA report
settings
are located.
All the ALTA reporting settings
reside within the Relative Error Ellipse box.

The 'Rel. Err. Points File:' check
box must be checked, and an .ALT file must be chosen to get
an
ALTA report. The .ALT file defines which points will be
included
in the ALTA reporting. See the previous discussion on the
creation of the .ALT file if you are unsure of how to
create an
.ALT file.
Check the 'Include ALTA tolerance
report' check box to create the ALTA tolerance checking
report
section. If an .ALT file has been chosen then the relative
error
section of the report will always be generated.
Next make sure the appropriate
tolerance and PPM has been defined. The ALTA standards
define
their positional standard as .07 plus 50 PPM. Additionally,
the ALTA standards require that the computations be
performed to a 95% confidence. The confidence interval is
set in
the 'Confidence Interval:' edit field.
The following is a sample ALTA
report:
Relative Error and ALTA Tolerances
==================================
SPECIFIC CONNECTIONS: Tolerance of 0.070 + 50 PPM.
at the 95% CI.
Actual
Allowable
Ratio
Sta.
Sta.
Dist.
Semi Major
Semi Major
Actual/Allowable
Semi Minor
Max. Err. Az.
27
500
204.5030
0.0793
0.0802
0.9890
0.0588
S 85-06'32.2"E
500
502
66.8572
0.1132
0.0733
1.5432
0.0842
S 86-05'06.7"E *
34
36
237.9748
0.0731
0.0819
0.8920
0.0731
N 00-00'00.0"E
ALL CONNECTIONS: Tolerance of 0.070 + 50 PPM. at the 95% CI.
All possible connections between the following
points were checked:
505,506,507,508,509,510,511,512,513,514,515,516,517,518,519,520,521,522,523,524,525,550,551,552,553,554,555,556,
557,558,559,560
Actual
Allowable
Ratio
Sta.
Sta.
Dist.
Semi Major
Semi Major
Actual/Allowable
Semi Minor
Max. Err. Az.
506
556
806.5402
1.0818
0.1103
9.8054
0.2586
S 86-37'40.4"E
507
556
827.2364
1.0832
0.1114
9.7268
0.2446
S 86-37'05.9"E
505
556
818.7994
1.0779
0.1109
9.7158
0.2386
S 86-48'24.5"E
508
556
854.9436
1.0836
0.1127
9.6108
0.2477
S 86-38'39.4"E
509
556
880.6338
1.0848
0.1140
9.5129
0.2489
S 86-45'39.4"E
521
556
798.2729
1.0387
0.1099
9.4500
0.2318
S 87-22'50.2"E
512
556
793.0518
1.0334
0.1097
9.4245
0.2127
S 87-21'38.9"E
517
556
907.2084
1.0856
0.1154
9.4106
0.2379
S 87-07'38.4"E
510
556
918.6572
1.0861
0.1159
9.3682
0.2525
S 86-52'46.5"E
516
556
935.1194
1.0885
0.1168
9.3228
0.2426
S 87-22'21.7"E
511
556
941.3134
1.0830
0.1171
9.2516
0.2283
S 87-33'40.2"E
518
556
962.0899
1.0893
0.1181
9.2231
0.2345
S 87-36'45.6"E
550
556
656.1441
0.9453
0.1028
9.1946
0.1952
S 87-09'41.3"E
515
556
978.6797
1.0882
0.1189
9.1495
0.2484
S 87-34'16.6"E
513
556
981.5606
1.0893
0.1191
9.1477
0.2452
S 87-42'02.1"E
514
556
985.2691
1.0895
0.1193
9.1349
0.2454
S 87-41'57.3"E
519
556
993.3973
1.0904
0.1197
9.1116
0.2388
S 87-32'58.7"E
504
556
1004.0126
1.0838
0.1202
9.0163
0.2643
S 86-11'23.8"E
520
556
1132.1493
1.0918
0.1266
8.6234
0.2423
S 87-17'23.7"E
524
556
1152.1979
1.0948
0.1276
8.5796
0.2993
S 86-39'15.0"E
551
556
530.9691
0.8252
0.0965
8.5471
0.1766
S 87-17'08.2"E
506
555
695.5978
0.8953
0.1048
8.5450
0.2389
S 86-24'27.4"E
556
800
1161.6986
1.0945
0.1281
8.5449
0.2766
S 86-03'20.2"E
503
556
1172.1735
1.0945
0.1286
8.5101
0.2767
S 86-03'36.5"E
522
556
1164.2729
1.0911
0.1282
8.5100
0.2546
S 86-47'21.4"E
If the "Ratio Actual/Allowable" is
1.0 or less, the positional tolerance of the two points
have
passed the ALTA standards.
The first part of the report labeled
"Specific Connections" will show all selected connections
whether they passed or failed. If a connection failed an
asterisk will be placed at the end of the line.
The second part of the report,
labeled "All Connections" will only show the connections
that
"failed" (we chose to see the worst 25).
If all the connections pass in the
SPECIFIC CONNECTION section, you will also see this message
in
the report:
*** All
Specific Connections passed ***
If all the connections pass in the ALL CONNECTIONS section,
you
will not see any error ellipses. You will see the following
message:
*** All connection combinations
passed ***
Processing a GPS Vector Network
GPS vector networks can be adjusted
with the current version of SurvNet. This chapter will
describe
the processing of a simple GPS network. Following is a
graphic
view of the GPS network that is to be adjusted. Points A
and B
are control points. The red lines represent measured GPS
vectors. Most GPS vendor's software can output GPS vectors
to a
file as part of the post processing of GPS data.
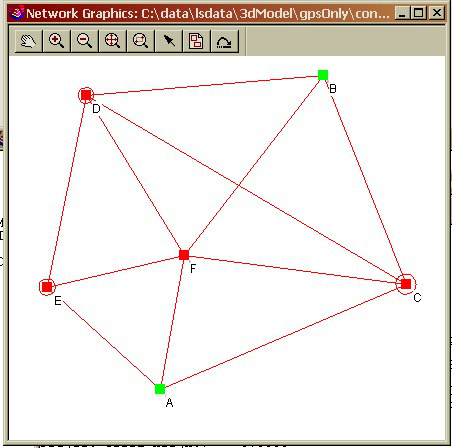
When processing GPS vectors certain
project settings are important. In the following settings
dialog
box notice that the 3D-model has been chosen, and SPC 1983
with
the appropriate zone has been chosen. The 3-D model and a
geodetic coordinate are required when processing GPS
vectors.
Though it is not require for GPS processing it is in most
cases
appropriate to chose to do geoid modeling.

The following settings dialog box
shows the raw files used in processing GPS files. A GPS
vector
file must be chosen. GPS vector files from various GPS
vendors
are currently supported. Following are the formats
currently
supported.

Coordinate control for the network
can be in one of several files. The control can be located
in
the GPS vector file itself. More typically, the control
points
can be regular coordinate records in the .RW5 or the .CGR
file.
The also can be entered as 'Supplemental Control' in one of
the
available formats.
When the control coordinates are in
the raw data file they are expected to be grid coordinates
with
orthometric heights.
The supplimental control file
formats support grid coordinates with orthometric heights,
geographic coordinates with orthometric heights, or
geocentric
coordinates with ellipsoid heights.
If the control coordinates are found
in the GPS vector file, they are assumed to be Earth
centered
XYZ.
As shown in the dialog above, it is not unusual to have
different distance units for GPS, total station data, and
control data. GPS vector data is usually in metric units
but the
total station raw file can be in US Feet. So, the distance
units
must be specified for the different raw data types.
In the Preprocessing Settings dialog
box the only important setting is the 'Compute Traverse
Closures:' options. If GPS loop closures need to be
computed,
the loop point numbers need to be entered into a closure
file.
See the chapter on traverse closures to see how to create
closure files.
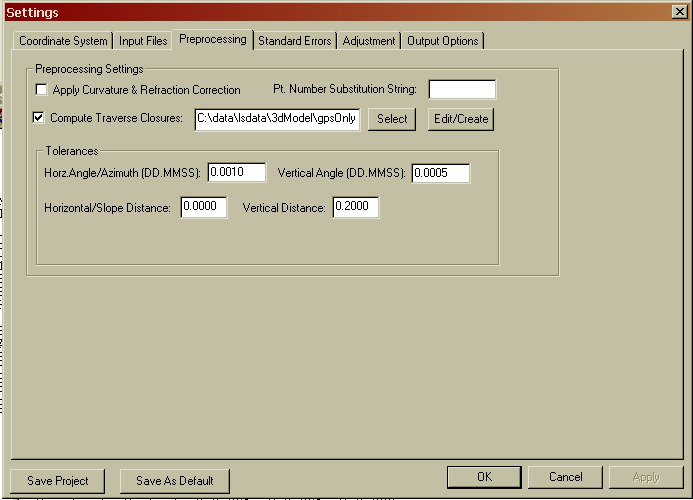
There are two GPS standard errors
fields in the Standard Errors Settings dialog box. The GPS
vector XYZ standard errors and covariances do not need to
be
defined as project settings since they are found in the GPS
vector data files.
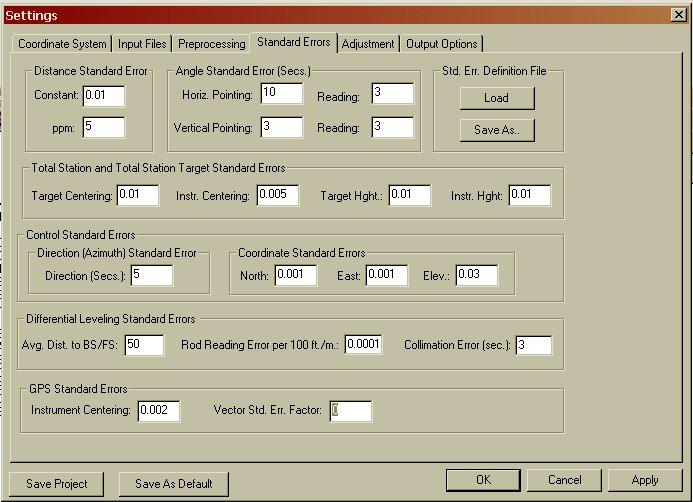
Instrument Centering: This
option is used to specify the error associated with
centering a
GPS receiver over a point.
Vector Standard Error Factor: This
option is used as a factor to increase GPS vector
standard
errors as found in the input GPS vector file. Some people
think that the GPS vector variances/covariances as found
in
GPS vector files tend do be overly optimistic. This
factor
allows the user to globally increase the GPS vector
standard
errors without having to edit the GPS vector file. A
factor of
0 is the default value and results in no change to the
GPS
vector standard errors as found in the GPS vector file.
Acceptable values are 0 through 9.
It is not a linear
progression.
The following section shows the
report generated by the least squares adjustment of the GPS
network. Explanations of the report are included in the
report section and are in bold text.
===============================
LEAST SQUARES ADJUSTMENT REPORT
===============================
Mon May 08 13:03:02 2006
3D Geodetic Model.
Input Raw Files:
C:\data\lsdata\3dModel\gpsOnly\control.cgr
GPS File:
C:\data\lsdata\3dModel\gpsOnly\chapt16.gps
Output File: C:\data\lsdata\3dModel\gpsOnly\gpsOnlyl.RPT
Traverse File: C:\data\lsdata\3dModel\gpsOnly\gpsLoops.cls
Curvature, refraction correction: OFF
Maximum iterations: 10 , Convergence Limit: 0.002000
1983 State Plane Coordinates, zone:4803 Wisconsin South
Horizontal Units: Meters
Confidence Interval: 95.00
Project Geoid Height:
0.0000
Default Standard Errors:
Distance: Constant 0.010 ,PPM: 5.000
Horiz. Angle: Pointing 10.0" ,Reading: 3.0"
Vert. Angle: Pointing 3.0" ,Reading: 3.0"
Total Station: Centering 0.005 ,Height:
0.010
Target: Centering 0.010 ,Height: 0.010
Azimuth: 5"
Coordinate Control: N:0.001, E:0.001,
Z:0.030,
GPS: Centering:0.000, Vector Err.
Factor:1.0
3-DIMENSIONAL ADJUSTMENT REPORT
===============================
The following
section shows the unadjusted measurements that make up
the
network. The control coordinates are displayed first
followed
by the GPS vectors. The control coordinates are displayed
as
latitude/longitude, SPC Grid XYZ, and geocentric XYZ. If
geoid
modeling is set both ellipsoid and orthometric elevations
are
displayed, ellipsoid elevation in the latitude/longitude
section and orthometric elevation in the SPC section. The
GPS
vector section shows the unadjusted delta XYZ, variances
and
covariances of the vectors.
Unadjusted Observations
=======================
Control Coordinates:
0 Observed Points,
2 Fixed Points,
0 Approx. Points
Sta.
Latitude
Longitude
Z (Ellip.)
StErr N:
StErr E:
StErr Z:
A
43-15'46.28901"N
89-59'42.16399"W
1382.62
FIXED
FIXED
FIXED
B
43-23'46.36261"N
89-54'00.75701"W
1235.46
FIXED
FIXED
FIXED
Grid XYZ
Sta.
N:
E:
Z (Geoid):
StErr N:
StErr E:
StErr Z:
A
140291.2060
600402.2380
1382.62
FIXED
FIXED
FIXED
B
155110.5390
608083.9250
1235.46
FIXED
FIXED
FIXED
Geocentric XYZ
Sta.
X:
Y:
Z:
StErr X:
StErr Y:
StErr Z:
A
402.3510
-4652995.3008
4349760.78
FIXED
FIXED
FIXED
B
8086.0316
-4642712.8473
4360439.08
FIXED
FIXED
FIXED
GPS Vectors:
13 Observations
From Sta.
Delta X
Variance Delta X
Covariance XY
To
Sta.
Delta Y
Variance Delta Y
Covariance XZ
Delta Z
Variance Delta Z
Covariance YZ
A
11644.223
0.001969
-1.916E-005
C
3601.217
0.001875
1.904E-005
3399.255
0.001965
-1.904E-005
A
-5321.716
0.0004316
-4.2E-006
E
3634.075
0.0003838
4.32E-006
3173.665
0.000401
-4.2E-006
B
3960.544
0.000461
-4.46E-006
C
-6681.247
0.0005092
4.14E-006
-7279.015
0.0004504
-4.46E-006
B
-11167.608
0.00054
-5.5E-006
D
-394.520
0.0005442
5.7E-006
-907.959
0.000534
-5.44E-006
D
15128.165
0.0002922
-2.86E-006
C
-6286.705
0.0003228
2.68E-006
-6371.058
0.0002616
-2.88E-006
D
-1837.746
0.0002462
-2.38E-006
E
-6253.853
0.0002554
2.44E-006
-6596.670
0.0002566
-2.42E-006
F
-1116.452
0.0001495
-1.58E-006
A
-4596.161
0.0001319
1.76E-006
-4355.906
0.0001523
-1.62E-006
F
10527.785
0.0005134
-4.5E-006
C
-994.938
0.0004326
4.8E-006
-956.625
0.0004794
-4.54E-006
F
-6438.136
0.0001889
-1.84E-006
E
-962.069
0.0001992
2.08E-006
-1182.230
0.0001765
-1.78E-006
F
-4600.379
0.0001866
-1.98E-006
D
5291.779
0.0001975
1.8E-006
5414.431
0.0002408
-1.98E-006
F
6567.231
0.0001329
-1.3E-006
B
5686.293
0.0001493
1.38E-006
6322.392
0.000121
-1.28E-006
B
-6567.231
0.0001103
-1.26E-006
F
-5686.303
0.0001495
1.22E-006
-6322.381
0.0001326
-1.26E-006
A
1116.458
0.0001324
-1.6E-006
F
4596.155
0.0001622
1.8E-006
4355.914
0.0001875
-1.64E-006
The optional
Traverse Closure section shows the GPS loop closures for
the
GPS loops defined in the closure, .CLS file.
Traverse Closures
=================
GPS Loop Points:
A,E,F,A
GPS Loop Closure;
Misclosure, X:
-0.0323
Y:
-0.0162
Z:
-0.0105
Closure error:
0.0376
Perimeter: 20229.3858
Precision: 1:537594
GPS Loop Points:
C,F,D,B,C
GPS Loop Closure;
Misclosure, X:
-0.0121
Y:
-0.0101
Z:
0.0002
Closure error:
0.0158
Perimeter: 41332.9807
Precision: 1:2622216
GPS Loop Points:
F,D,B,F
GPS Loop Closure;
Misclosure, X:
-0.0022
Y:
-0.0044
Z:
0.0097
Closure error:
0.0109
Perimeter: 30814.5047
Precision: 1:2833226
Following are
the final adjusted coordinates. Included in the report
are
point grid factor, elev. factor and the combined factor.
Following the adjusted coordinates are the error
ellipses,
followed by the adjusted measurements section.
Adjusted Geographic Coordinates
Adjusted Grid Coordinates, (Meters)
Sta.
N:
E:
Z (Geoid):
StErr N:
StErr E:
StErr Z:
C
145233.5553
612043.7117
1103.10
0.0062
0.0062
0.0060
E
145091.9380
595081.6888
914.98
0.0053
0.0053
0.0052
D
154179.9383
596919.0552
894.01
0.0051
0.0050
0.0052
F
146611.7860
601518.4564
1024.24
0.0029
0.0027
0.0028
Adjusted Geocentric Coordinates, (Metric)
Sta.
X:
Y:
Z:
StErr X:
StErr Y:
StErr Z:
C
12046.5807
-4649394.0824
4353160.06
0.0062
0.0062
0.0060
E
-4919.3403
-4649361.2195
4352934.45
0.0053
0.0053
0.0052
D
-3081.5836
-4643107.3693
4359531.12
0.0050
0.0051
0.0052
F
1518.8008
-4648399.1451
4354116.69
0.0027
0.0029
0.0028
Adjusted XYZ Coordinates Error Ellipses, 95% CI
Sta.
Semi Major
Semi Minor
Max.
Error
Az.
Elev.
Axis
Axis
C
0.0161
0.0159
S 25-49'31.6"E
0.0157
E
0.0138
0.0137
S 29-24'51.2"E
0.0136
D
0.0133
0.0130
S 11-30'48.4"E
0.0135
F
0.0074
0.0070
S 05-18'52.7"E
0.0073
Adjusted Observations
=====================
GPS Vectors:
13 Observations
From Sta.
Delta X
Residual
StdRes
StdDev
To
Sta.
Delta Y
Residual
StdRes
StdDev
Delta Z
Residual
StdRes
StdDev
A
11644.2435
0.0203
0.4581
0.0062
C
3601.2230
0.0065
0.1502
0.0062
3399.2795
0.0245
0.5521
0.0060
A
-5321.7125
0.0039
0.1894
0.0053
E
3634.1005
0.0251
1.2810
0.0053
3173.6781
0.0129
0.6429
0.0052
B
3960.5330
-0.0112
0.5219
0.0062
C
-6681.2418
0.0049
0.2181
0.0062
-7279.0098
0.0050
0.2378
0.0060
B
-11167.6067
0.0009
0.0406
0.0050
D
-394.5281
-0.0077
0.3288
0.0051
-907.9606
-0.0013
0.0568
0.0052
D
15128.1644
-0.0003
0.0194
0.0063
C
-6286.7131
-0.0077
0.4275
0.0064
-6371.0592
-0.0009
0.0573
0.0061
D
-1837.7566
-0.0107
0.6844
0.0056
E
-6253.8502
0.0032
0.2006
0.0057
-6596.6687
0.0010
0.0619
0.0057
F
-1116.4498
0.0025
0.2079
0.0027
A
-4596.1557
0.0053
0.4606
0.0029
-4355.9139
-0.0077
0.6259
0.0028
F
10527.7799
-0.0053
0.2318
0.0061
C
-994.9372
0.0005
0.0223
0.0061
-956.6272
-0.0026
0.1175
0.0060
F
-6438.1411
-0.0047
0.3391
0.0050
E
-962.0744
-0.0050
0.3507
0.0051
-1182.2367
-0.0062
0.4631
0.0050
F
-4600.3844
-0.0057
0.4188
0.0047
D
5291.7758
-0.0027
0.1889
0.0048
5414.4321
0.0010
0.0615
0.0050
F
6567.2308
-0.0003
0.0220
0.0027
B
5686.2978
0.0052
0.4292
0.0029
6322.3917
-0.0000
0.0037
0.0028
B
-6567.2308
0.0003
0.0248
0.0027
F
-5686.2978
0.0055
0.4474
0.0029
-6322.3917
-0.0110
0.9511
0.0028
A
1116.4498
-0.0079
0.6903
0.0027
F
4596.1557
0.0004
0.0321
0.0029
4355.9139
-0.0002
0.0128
0.0028
The final section displays the statistic, followed by
sideshots if there are any. Side shots would be a point
that
has only a single GPS vector going to or from the point.
Statistics
==========
Solution converged in 2 iterations
Degrees of freedom:27
Reference variance:0.26
Standard error unit Weight: +/-0.51
Failed the Chi-Square test at the 95.00
significance level
14.573 <= 6.927 <= 43.195
Sideshots
=========
Processing a Total Station and a
GPS Vector Network
Processing a GPS vector network
together with conventional total station data is similar to
processing a GPS network by itself. The only difference in
regards to project settings is that a raw data file
containing
the total station data needs to be chosen as well as a GPS
vector file. The project must be set up for the 3D model
and a
geodetic coordinate system needs to be chosen. The total
station
must contain full 3D data, including all rod heights and
instrument heights measured. Following is a view of the
Input
Files Settings dialog box showing both a GPS vector file
and a
total station raw data file chosen in a single project. It
is
not uncommon to have different distance units for GPS data
and
total station data, so make sure the correct units are set
for
data types.
Following is a report generated from a project that
combined GPS
vectors and total station data. Notice that the report is
very
similar to the GPS vector only project report.
Explanations of the report are included in the report and
are in
bold, normal text.
===============================
LEAST SQUARES ADJUSTMENT REPORT
===============================
Mon May 08 15:08:39 2006
3D Geodetic Model.
Input Raw Files:
C:\data\lsdata\3dModel\GPSCombined\rawCombined.cgr
GPS File:
C:\data\lsdata\3dModel\GPSCombined\VectorJob.gps
Output File:
C:\data\lsdata\3dModel\GPSCombined\gpsCombined2D.RPT
Curvature, refraction correction: OFF
Maximum iterations: 10 , Convergence Limit: 0.000200
1983 State Plane Coordinates, zone:0202 Arizona Central
Horizontal Units: Meters
Confidence Interval: 95.00
Project Geoid Height:
-30.000
Default Standard Errors:
Distance: Constant 0.002 ,PPM: 5.000
Horiz. Angle: Pointing 0.6" ,Reading: 0.0"
Vert. Angle: Pointing 2.0" ,Reading: 3.0"
Total Station: Centering 0.001 ,Height:
0.002
Target: Centering 0.001 ,Height: 0.002
Azimuth: 5"
Coordinate Control: N:0.010, E:0.010,
Z:0.030,
GPS: Centering:0.001, Vector Err.
Factor:10.0
3-DIMENSIONAL ADJUSTMENT REPORT
===============================
Notice that in this example geoid modeling was used.
Notice that the ellipsoid elevation is displayed with the
latitudes and longitudes. Orthometric elevations are
displayed
with the SPC83 grid coordinates.
Unadjusted Observations
=======================
Control Coordinates:
0 Observed Points,
2 Fixed Points,
0 Approx. Points
Sta. Latitude
Longitude
Z (Ellip.) StErr N:
StErr E:
StErr Z:
17
32-58'09.73116"N
112-47'13.55718"W
179.384
FIXED
FIXED
FIXED
12
33-04'44.24403"N
112-54'36.04569"W
194.299
FIXED
FIXED
FIXED
Grid XYZ
Sta.
N:
E:
Z (Geoid):
StErr N:
StErr E:
StErr Z:
17
218691.215
131994.035
209.384
FIXED
FIXED
FIXED
12
230946.179
120618.775
224.299
FIXED
FIXED
FIXED
Geocentric XYZ
Sta.
X:
Y:
Z:
StErr X:
StErr Y:
StErr Z:
17
-2074605.540
-4938403.868
3451206.784
FIXED
FIXED
FIXED
12
-2082621.133
-4927852.115
3461405.389
FIXED
FIXED
FIXED
Notice that in
the 3-D model distances are not reduced to horizontal or
grid.
Slope distances are reduced to mark to mark distances. A
Mark to mark distance is the computed slope distance from
the
monument to monument.
Mark to Mark Slope Distances:
8 Observations
From Sta.
To Sta.
Dist.
StErr
13
51
4013.947
0.022
51
52
2208.268
0.013
52
53
2202.068
0.013
53
18
2714.298
0.016
51
15
1601.219
0.010
52
15
2499.608
0.015
52
16
2639.678
0.015
53
16
2859.648
0.016
Notice that in
the 3-D model distances vertical angles are considered as
separate measurements. Vertical angles have also been
converted to mark to mark vertical angles.
Mark to Mark Vertical Angles:
8 Observations
From Sta.
To Sta.
Vertical
Ang.
StErr (Sec.)
13
51
090-04'46.6"
3.6
51
52
090-14'33.0"
3.6
52
53
089-43'23.7"
3.6
53
18
089-58'21.3"
3.6
51
15
090-27'52.0"
3.6
52
15
090-05'53.1"
3.6
52
16
090-07'37.0"
3.6
53
16
090-20'24.0"
3.6
Horizontal Angles:
8 Observations
BS Sta.
Occ. Sta.
FS Sta.
Angle
StErr (Sec.)
12
13
51
067-58'23.5"
0.8
13
51
52
160-18'01.7"
0.9
51
52
53
213-47'22.1"
0.9
52
53
18
198-52'17.3"
0.9
13
51
15
240-35'47.0"
0.9
51
52
15
320-50'46.2"
0.9
51
52
16
142-02'01.5"
0.9
52
53
16
061-14'43.7"
0.9
GPS Vectors:
8 Observations
From Sta.
Delta X
Variance Delta X
Covariance XY
To
Sta.
Delta Y
Variance Delta Y
Covariance XZ
Delta Z
Variance Delta Z
Covariance YZ
12
-507.728
6.64E-005
7.231E-005
13
-5749.936
0.0002136
-1.914E-005
-8484.249
7.969E-005
-6.468E-005
12
5291.644
4.281E-005
4.478E-005
16
-4337.804
0.0001497
-1.252E-005
-3048.755
5.397E-005
-4.592E-005
13
4725.685
0.0001066
6.211E-005
15
-1175.977
0.0002265
-5.722E-005
1127.564
0.0001289
-9.329E-005
13
5799.369
5.779E-005
5.987E-005
16
1412.130
0.0001984
-1.63E-005
5435.492
7.569E-005
-6.123E-005
15
3797.625
0.0001611
0.0001685
17
-3625.824
0.001025
-8.94E-005
-2841.898
0.0003411
-0.000365
16
2723.952
6.601E-005
6.098E-005
17
-6213.925
0.0001595
-3.951E-005
-7149.837
0.0001187
-8.61E-005
16
3983.996
4.166E-005
3.668E-005
18
-2884.461
9.022E-005
-2.464E-005
-1679.646
6.868E-005
-4.835E-005
17
1260.043
3.331E-005
2.912E-005
18
3329.461
7.695E-005
-1.931E-005
5470.192
6.021E-005
-4.279E-005
Adjusted Geographic Coordinates
Adjusted Grid Coordinates, (Meters)
Sta.
N:
E:
Z (Geoid):
StErr N:
StErr E:
StErr Z:
13
220822.407
122293.821
205.469
0.011
0.006
0.007
51
222914.991
125719.002
200.982
0.013
0.008
0.028
52
224634.004
127105.001
191.980
0.011
0.009
0.028
53
225289.986
129206.984
202.983
0.011
0.008
0.032
18
225217.062
131920.203
204.850
0.008
0.005
0.007
15
222134.510
127117.007
188.195
0.013
0.008
0.011
16
227273.259
127147.034
186.643
0.007
0.004
0.006
Adjusted Geocentric Coordinates, (Metric)
Sta.
X:
Y:
Z:
StErr X:
StErr Y:
StErr Z:
13
-2083128.851
-4933602.055
3452921.136
0.006
0.011
0.007
51
-2079539.552
-4933856.880
3454699.821
0.008
0.013
0.028
52
-2077907.135
-4933512.881
3456146.639
0.009
0.011
0.028
53
-2075836.064
-4933996.021
3456717.919
0.008
0.011
0.032
18
-2073345.496
-4935074.401
3456676.978
0.005
0.008
0.007
15
-2078403.158
-4934778.040
3454048.691
0.008
0.013
0.011
16
-2077329.484
-4932189.930
3458356.627
0.004
0.007
0.006
Adjusted XYZ Coordinates Error Ellipses, 95% CI
Sta.
Semi Major
Semi Minor
Max.
Error
Az.
Elev.
Axis
Axis
13
0.030
0.013
N 20-10'14.1"E
0.019
51
0.036
0.019
N 21-18'08.4"E
0.071
52
0.029
0.020
N 29-51'55.4"E
0.072
53
0.030
0.021
N 19-08'38.0"E
0.083
18
0.022
0.010
N 26-26'36.4"E
0.018
15
0.034
0.020
N 17-51'28.5"E
0.028
16
0.021
0.009
N 22-55'33.0"E
0.014
Adjusted Observations
=====================
Adjusted Mark to Mark Distances
From Sta.
To Sta.
Distance
Residual
StdRes.
StdDev
13
51
4013.941
-0.005
0.244
0.013
51
52
2208.258
-0.011
0.803
0.010
52
53
2202.072
0.004
0.281
0.011
53
18
2714.316
0.018
1.146
0.011
51
15
1601.218
-0.001
0.072
0.008
52
15
2499.610
0.002
0.145
0.008
52
16
2639.683
0.005
0.357
0.008
53
16
2859.656
0.008
0.469
0.008
Root Mean Square (RMS)
0.008
Adjusted Angles
BS Sta. Occ. Sta.
FS Sta.
Angle
Residual
StdRes
StdDev(Sec.)
12
13
51
067-58'22.4"
-1.1
1.3
0.4
13
51
52
160-18'02.3"
0.6
0.7
0.7
51
52
53
213-47'22.2"
0.1
0.1
0.7
52
53
18
198-52'17.5"
0.2
0.2
0.9
13
51
15
240-35'46.5"
-0.5
0.5
0.9
51
52
15
320-50'47.2"
1.0
1.2
0.7
51
52
16
142-02'01.5"
-0.0
0.0
0.8
52
53
16
061-14'43.4"
-0.3
0.4
0.7
Root Mean
Square (RMS)
0.6
Adjusted vertical angles
From Sta.
To Sta.
Vertical
Ang.
Residual
StdRes
StdDev(Sec.)
13
51
090-04'55.5"
-9.0
*
2.5
1.4
51
52
090-14'36.5"
-3.5
1.0
2.9
52
53
089-43'25.0"
-1.2
0.3
3.1
53
18
089-58'22.0"
-0.7
0.2
2.4
51
15
090-27'53.0"
-1.0
0.3
3.4
52
15
090-05'52.9"
0.2
0.1
2.3
52
16
090-07'39.9"
-2.9
0.8
2.1
53
16
090-20'24.9"
-0.9
0.2
2.3
Root Mean Square (RMS)
3.6
GPS Vectors:
8 Observations
From Sta.
Delta X
Residual
StdRes
StdDev
To
Sta.
Delta Y
Residual
StdRes
StdDev
Delta Z
Residual
StdRes
StdDev
12
-507.7297
-0.0022
0.267
0.0061
13
-5749.9259
0.0102
0.699
0.0109
-8484.2524
-0.0037
0.409
0.0072
12
5291.6464
0.0028
0.430
0.0045
16
-4337.7947
0.0096
0.785
0.0074
-3048.7649
-0.0095
1.298
0.0055
13
4725.6931
0.0085
0.818
0.0080
15
-1175.9849
-0.0083
0.549
0.0115
1127.5557
-0.0086
0.754
0.0100
13
5799.3676
-0.0014
0.185
0.0060
16
1412.1252
-0.0048
0.339
0.0107
5435.4912
-0.0010
0.116
0.0073
15
3797.6184
-0.0067
0.524
0.0083
17
-3625.8277
-0.0034
0.107
0.0128
-2841.9072
-0.0093
0.505
0.0109
16
2723.9438
-0.0081
0.999
0.0045
17
-6213.9378
-0.0129
1.022
0.0074
-7149.8428
-0.0061
0.562
0.0055
16
3983.9875
-0.0082
1.268
0.0054
18
-2884.4705
-0.0092
0.965
0.0079
-1679.6485
-0.0024
0.290
0.0069
17
1260.0437
0.0003
0.049
0.0052
18
3329.4673
0.0063
0.719
0.0079
5470.1943
0.0021
0.276
0.0069
Statistics
==========
Solution converged in 3 iterations
Degrees of freedom:27
Reference variance:1.32
Standard error unit Weight: +/-1.15
Passed the Chi-Square test at the 95.00
significance level
14.573 <= 35.620 <= 43.195
Sideshots
=========
Example Projects
On the installation disk there are a
variety of different least squares projects one can use to
become familiar with least squares and SurvNet. These
projects
are located in the C&G/Carlson application folder under
the
\Data\SurvNet\ subdirectory.
When
you open a project for review, you will need to check the
project settings, input data files to see if the data
files
show up. If they do not, you will have to re-select
them.
Simple Traverse with Traverse
Closure
This project is located in
\Data\SurvNet\2DTraverse. The name of the project is
Traverse.
This project illustrated a basic loop traverse with two
control
points and a known azimuth for control. This project also
illustrates how to obtain traditional closure information
as
part of the least squares report. The program uses the
2D/1D
model and uses a local coordinate system.
Traverse using State Plane
Coordinates
This project is located in
\Data\SurvNet\SPCTraverse. The name of the project is
TravSPCUSFt. This project illustrated a basic network with
three
GPS control points for control. This project is computed
using
the SPC83 NC Grid coordinate system. The project is set up
to
generate traditional loop closure data. The program uses
the
2D/1D model. No elevations are computed or adjusted as
there
were no HI's or rod readings collected. Notice, that the
project
uses two raw data files. One file contains the raw angle
&
distance data. The other raw data file contains the control
for
the project.
Network with ALTA Reporting
The ALTA reporting project is
located in \Data\SurvNet\ALTARpt. The name of the project
is
ALTARpt. This project illustrates how to perform ALTA
tolerance
testing on points within a network.
GPS Network with GPS
Loop Closures
The GPS network project is located
in \Data\SurvNet\GPSNetwork. The name of the project is
GPSOnly.
This project is a simple GPS network. In addition to the
least
squares computation and report, GPS loop closures were
generated
for various GPS loops for this project.
Level Network
The differential leveling project is
located in \Data\SurvNet\LevelNetwork. The name of the
project
is network1. This project is a simple differential leveling
network.
Basic 3D Project
The basic 3D adjustment project is
located in \Data\SurvNet\3DNetwork. The name of the project
is
pg08. This project is a simple four point example network.
Notice in the raw data that all set up records have an HI
and
all FS readings have valid rod heights. Also note that
there are
valid vertical angles for every slope distance. Since the
3D
model is a true one process 3 dimensional adjustment, you
must
enter all valid slope distances and vertical angles. Be
aware
that you cannot just enter a horizontal distance and a
vertical
angle of 90 from reduced field notes when adjusting using
the 3D
model.
3D Project Combining Total Station
and GPS Vectors
The total station raw data combined
with GPS vectors example is located in
\Data\SurvNet\GPSandTtlSta. The name of the project is
GPSandTtlSta. This project illustrates a 3D model
adjustment
that combines both GPS vectors and data from a total
station.
Since there is GPS data the 3D model must be used. Notice
that
the GPS vectors are in meters but the total station data is
in
US feet and the output coordinates are in US feet. Always
make
sure your units are correct for each data type especially
when
using the 3D model.
Resection
The total station
raw data combined with GPS vectors example is located in
\Data\SurvNet\Resection. The name of the project is Resect.
This
project illustrates an angle and distance resection. There
is no
real difference in a resection project than any other angle
and
distance network in terms of how the data is collected or
how
the project is set up.
Entry into the SurvNet program is easy. It can be accessed in two different ways. The easiest way to start the program is to select SurvNetfrom the Survey menu. The other method is to start SurvNet from within the Raw Data File editor. You get to this editor by selecting Edit-Process Raw Data Filefrom the Survey menu. When in the editor, selecting the Process (Compute Pts) menu and click SurvNet.
|
|
|
Survey menu shows the two ways to access SurvNet |
|
|
|
Process menu inside of Raw Data File Editor |